ヴイストン株式会社
01製品動画
Vstone公式Youtubeチャンネル
YouTubeチャンネルにて、弊社製品を題材とした解説動画や活用動画などを配信しております。
毎週配信を目標に取り組んでおりますので、動画をお楽しみ頂けましたらチャンネル登録・高評価をお願いします!!
解説記事blog
下記blogにて、アームの制御に関する技術解説を公開しております。
NEWROS対応SDK の無償配布を開始

ROSによる制御やシミュレーションに対応し、ROSの入門教材として活用可能
アカデミック スカラロボット ROS対応SDKは、既発売の学習用ロボットアーム アカデミック スカラロボットをROSに対応させるSDKです。ロボットアームの学習用途に広く採用されているアカデミック スカラロボットにおいて、ROSによる制御やシミュレーションを行えるようになり、より多彩な教育・学習分野に対応します。本ツールは、アカデミック スカラロボットを接続したPCに導入して使用します。本ツールを導入したPCにおいて、アカデミック スカラロボット専用のROSドライバノードを実行すると、アカデミック スカラロボットをROSデバイスとして制御できるようになります。なお、本ツールはGitHub上で無償配布されます。
【アカデミックスカラロボット ROS対応SDK】
アカデミック スカラロボットを入門用ROSデバイスとして活用可能
本ツールを導入したPCに接続されたアカデミック スカラロボットは、ROS対応のロボットアームとして制御することができます。アカデミック スカラロボットと本ツールを組み合わせて使うことにより、ROSの基本的な仕組みやROSのハードウェア対応について、実感的に学習することができます。また、ロボットアームの特長を生かした順運動学・逆運動学の学習や、「姿勢の指定」・「姿勢の取得」を利用した外部デバイスからのアームの制御、外部デバイスとの協調動作などを学ぶことが可能です。ROSの総合的な学習のためには、制御などのソフトウェア側と、実際に稼働させるハードウェア側とを両輪で理解する必要があります。本ツールは、卓上サイズで安全なロボットアームを使うことにより、効率的で実用的なROS学習を実現します。
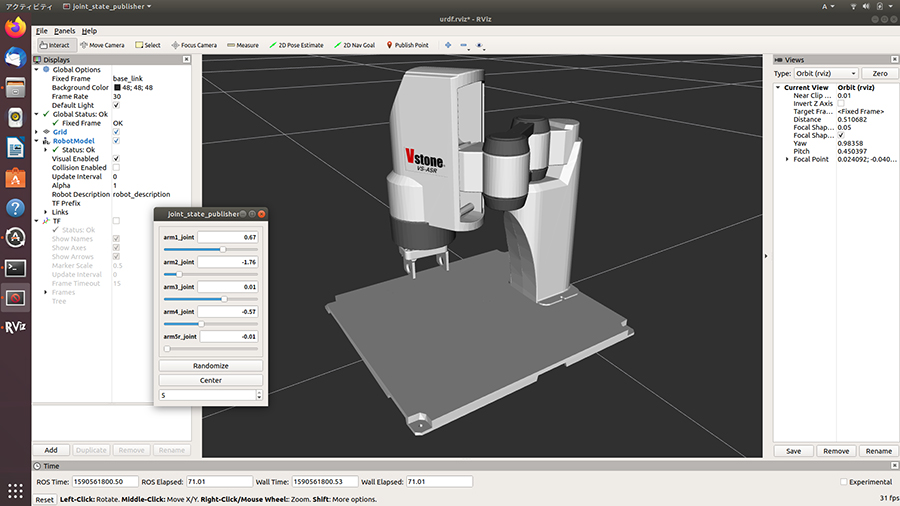
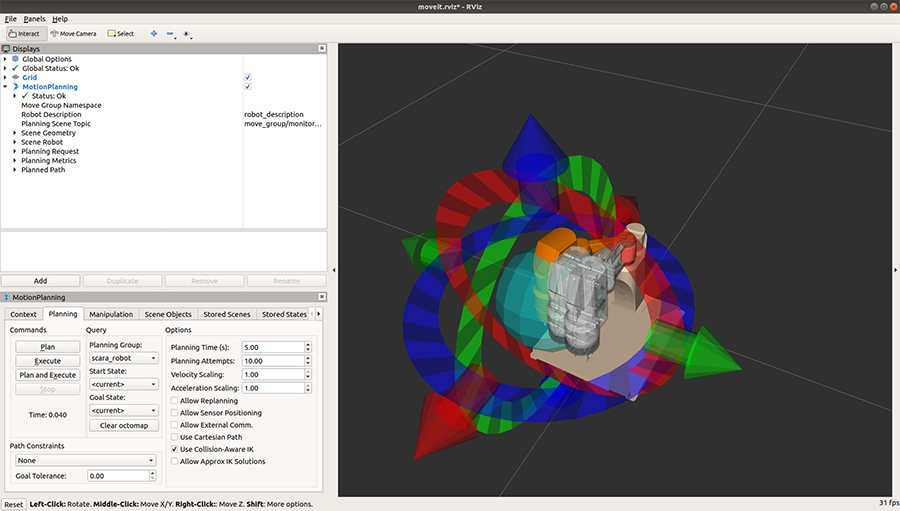
さまざまなツールやシミュレータでの利用が可能
本ツールを用いることで、広く用いられるROS関連ツールやシミュレーターにアカデミック スカラロボットを対応させることができます。本ツールにはrvizでの3Dモデルデータを含みますので、rvizでのロボットモデル表示や、Gazeboによるシミュレーション、MoveItによるシミュレーションや制御なども可能です。
本ツールの推奨動作環境
| OS | Ubuntu18.04 (64bit) |
|---|---|
| ROS | ROS Melodic |
| CPU | Intel(R) Core i5 8259U |
| メモリ | DDR4 PC4-19200 8GB |
| ストレージ | M.2 SSD 256GB |
| グラフィック | Intel(R) Iris(R) Plus Graphics 655 |
02ロボットアーム制御のプログラミング学習教材

アカデミック スカラロボット(Academic SCARA Robot)は、ロボットの制御技術を学習するためのプログラミング教材です。 座標変換などが容易な水平多関節(SCARA)型のロボットアームを採用し、物体運搬の動作を元にロボット制御プログラミングを学習できます。 また、付属のペンホルダに組み替えてボールペン等を装着でき、図形描画のプログラミングも学習可能です。本体は組み立て済みで、箱を開けてすぐにプログラミングを開始できます。

制御方法は、シミュレータ機能搭載のモーションエディタ「SCARA Programmer」、C言語プログラミングの二通りに対応。いずれもweb上で関連ソフトウェアを無償公開し、 また、基本処理を含むサンプルソースも公開しています。産業用ロボットアームをモデルにした実機を安価で導入でき、初心者でも扱いやすい環境が整っているため、 教育現場などでロボット制御の学習をより効果的に行うことができます。
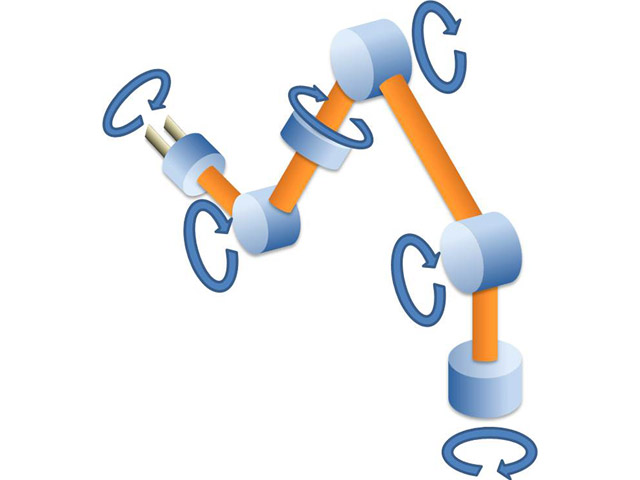
03水平多関節(SCARA)型ロボットアームの特長
ロボットアームの制御には、モータの角度と手先の座標の変換処理が必須ですが、本製品に採用した水平多関節型ロボットアームは、 垂直多関節型ロボットアームと比較してこの変換処理が容易という特長があります。
垂直多関節型ロボットアームの場合、X/Y/Zの各軸に影響するモータが複雑に絡み合うため、座標変換は行列演算を駆使して三次元的に行う必要があります。 一方、水平多関節型ロボットアームの場合、手先のX(幅方向)・Y(奥行方向)座標はアーム部各軸の角度の合算で、Z(高さ方向)は上下軸のみでそれぞれ求められます。 この演算は三角関数など中高生レベルの数学で求まります。座標変換を二次元で平面的に行えるため、PtoP・CP制御の際の軌道計算も容易です。
04用途に応じて、物体運搬と図形描画の2種類に組み替え可能
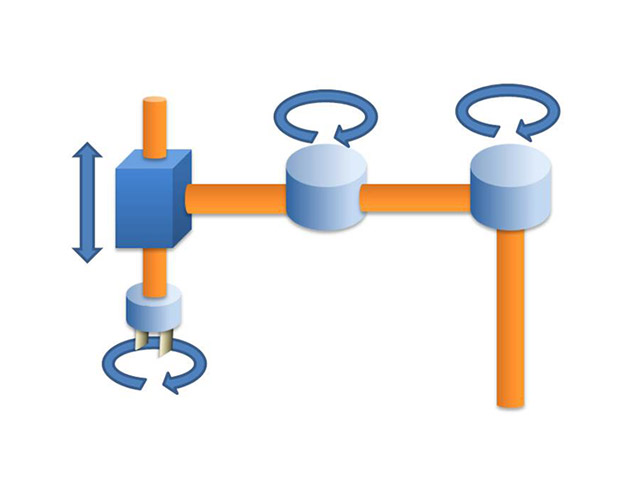
本製品は組立完成版のため、組立ミスによる動作不調や破損などの心配がなく、プログラミング学習に専念できます。 軸数は、アーム軸×2、アーム上下軸×1、ハンド回転軸×1、ハンド開閉軸×1の5軸構成です。また、付属のペンホルダ部品に組み替えることで、ペンを装着して図形描画を行うこともできます。
ハンドタイプ(5軸)
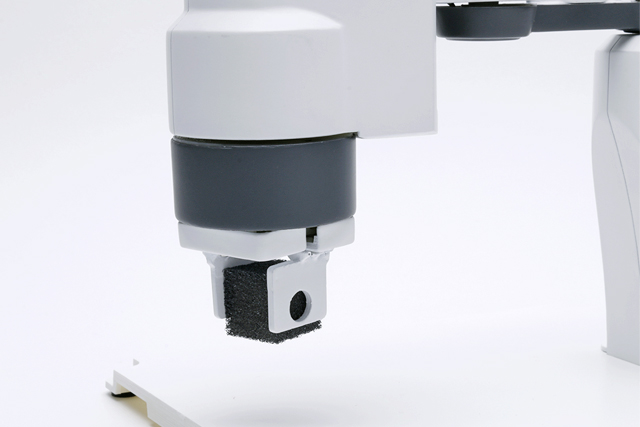
標準の状態です。手先に回転軸を持つハンドを搭載し、物体の把持・運搬・障害物の回避などのプログラミング学習が可能です。
ハンド軸はストローク幅20mmで、軸幅の範囲は5mm〜50mm(爪の取り付け位置を4か所から選択)。爪には抜き穴を空け、球や複雑な形の物体も把持しやすくなっています。
ペンタイプ(3軸)

付属のペンホルダに組み替えた状態です。手先にペン(ボールペン・筆ペン等)を装着し、本体土台部分にA5サイズの用紙を固定して、図形の描画が可能です。
学習用途として、文字・図形・グラフや、PtoP・CP制御の軌跡を描画するプログラミングが可能です。
05GUIソフトウェアとC言語プログラミングの二通りの制御が可能
ロボット本体は、PCとUSB接続して通信制御します。USB HIDのため、デバイスドライバーのインストールは不要です。 また、制御ソフトとして、GUI形式の専用モーションエディタ「SCARA Programmer」と、C言語プログラミングの2種類に対応しています。
専用モーションエディタ SCARA Programmer
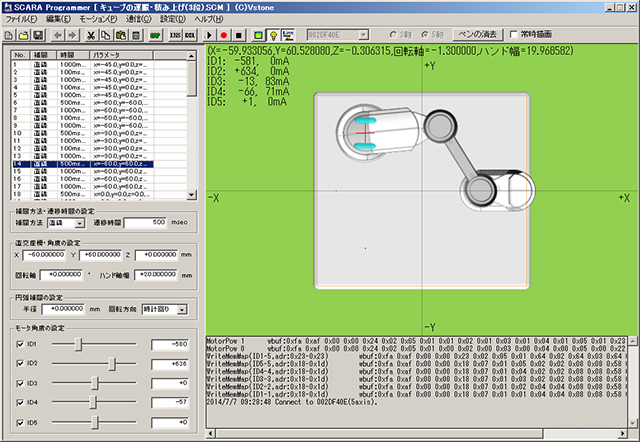
SCARA Programmerは、シミュレータ機能を搭載したモーションエディタです。ソフトはGUI形式で、マウスのみで簡単に操作できます。 シミュレータは実機とリアルタイムで連動し、実機からポーズやモーションを教示(キャプチャ)したり、シミュレータ上のロボットをマウスでドラッグして実機を操縦することができます。
また、モータ角度とアーム先端の座標を自動的に変換し、座標を入力してポーズを生成できます。本体の使用環境に合わせて、ロボットの向きや原点などの座標系を設定変更することが可能です。
モーション作成では、ポーズ間の補間方法を選択でき(直線・円弧)、PtoP・CP制御の実習が可能です。 また、ロボットの手先の軌跡をシミュレータ上に描画でき、ロボットの軌道を確認しながらプログラミングできます。
- SCARA Programmerは、こちらのダウンロードページで公開しています。
C言語プログラミング
C言語プログラミングには、開発環境としてMicrosoft Visual Studio Express(無償)等を使用できます。 また、ロボット制御に必要な処理をサンプルソースとして多数公開しており、初心者でも簡単にロボットの制御プログラミング学習を始められます。
- C言語サンプルソース及び開発環境の導入説明は、こちらのダウンロードページで公開しています。
06OpenRTM-aistへの対応

OpenRTM-aistの対応サンプルが公開されています。
国立研究開発法人産業技術総合研究所が開発・配布しているRTミドルウエア「OpenRTM-aist」の公式サイトにて、 アカデミックスカラロボットに対応したサンプルプログラムが無償配布されています。
このサンプルプログラムでは、USBメモリにRTM環境を搭載することにより、インストール不要でOpenRTM-aistを体験することができます。 また、アカデミックスカラロボット用のサンプルプログラムでは、CSVファイルにコマンドを記述するのみで、手軽にロボットの制御を実現することが可能です。
※OpenRTM-aistのサンプルプログラムにつきましては、埼玉大学設計工学研究室をはじめとした関係者皆様方のご尽力により公開されています。 ヴイストン株式会社では、サンプルプログラムに関する動作保証やご質問には回答させていただくことができません。ご了承ください。
07用途事例
NISSHA株式会社の「フィルム型の摩擦・せん断力センサー」紹介動画にて、アカデミック スカラロボットが使用されました。
(紹介動画に登場する機体は、アカデミック スカラロボットに対してデモ用に「摩擦・せん断力センサー」を取り付けた用途事例です。この組み合わせで市販されているものではごさいません)
【製品仕様】
- 外形:210(W)×230(D)×200(H)[mm]
- 重量:約570g
- フレーム材質:樹脂
- 自由度:合計5自由度
- インターフェース:USB HID(mini-B)
- 対応OS:Windows
- 特長:モーションエディタソフト、及びC言語サンプルソースを公開
Intel Core、Irisは、Intel Corporation またはその子会社の登録商標または商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。
GitHubは、GitHub Inc.の商標または登録商標です。
ROS、Gazeboは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
その他、記載されている製品名などの固有名詞は、一般に各社の商標または登録商標です。
