ヴイストン株式会社
NEWSコミュニケーション研究のためのヒューマノイドタイプロボット

Robovie-R4は、コミュニケーション研究のための等身大ロボット「Robovie-R」シリーズの最新モデルです。移動のための台車部分に研究開発用台車ロボットとして定評のある「メガローバーVer.3.0」を採用したほか、上半身の可動軸にはエンコーダー付きDCモーターを用いることにより、コミュニケーションロボットに求められる静粛性と機敏な動作性能を実現しました。また、複雑化する昨今のコミュニケーション研究の需要に合わせ、様々なセンサーや機材を追加で開発・搭載できるように配慮した設計となっています。本体に内蔵したバッテリーから搭載機器に給電する形で構築することができ、内部機器も含めたロボット全体での自律動作を実現できます。
ロボット機器などを活用したコミュニケーション分野での研究・開発は、今後ますます重要性が高まってくるものと考えられます。ヴイストン株式会社では、Robovie-R4の発売を通して、これら分野の研究開発をいっそう促進させるとともに、来たるべきヒトとロボットが共存する社会の実現に向け、積極的に貢献してまいります。
01 親しみやすいデザインを採用
Robovie-R4は、親しみを感じるヒューマノイドタイプの上半身デザインと、さまざまな環境で安定して走行できる台車型の移動機構を備えており、コミュニケーション研究のためのロボットプラットフォームとして、幅広い活用が可能です。この特徴を生かし、ヒューマンインタラクションを核として、一般施設での接客・案内用途や、見守りなどの福祉分野での活用、あるいはこれらの用途において複数台あるいは複数種のロボット機材を統合的に制御する形態の研究開発用など、適用する用途に縛られない、幅広い運用に対応可能です。
全体の配色や、顔・指先のデザインなどは、実績のある旧モデル「Robovie-R3」を踏襲し、同時に使用しても違和感のないものとなっています。また、今回新たに両眼のLEDを追加し、コミュニケーション時に必要なステータスの表現や機体状況の表示など、用途に合わせた活用を可能としています(両眼のLEDについて、制御をシンプルに行う目的で、標準の状態では左右を一括で制御する仕様となっています)。
本体の背面パネルには、電圧を表示するディスプレイと非常停止スイッチを標準搭載しており、ロボットとしての美しいデザインを損なわず、安定した稼働を実現させることができます。

拡張性の高い本体構造
(ROS PC(UM350)オプション搭載時)

本体側面、背面
02 高い拡張性を確保
今回発売するRobovie-R4においては、標準状態では台車部分と上半身部分の動力部品および、スピーカーとLEDのみが搭載された仕様となっています。同時に、さまざまな用途に合わせたセンサーの追加などが可能な本体構造となっており、内部に設けられた余剰スペースへの機材の搭載や、外装を加工しセンサーを追加するなど、導入する現場のニーズに合わせた、柔軟なカスタマイズができます。
なお、追加する機器の種類によっては、本体ご購入時に弊社でフレーム設計や取り付けが可能である場合もありますので、詳細はヴイストン株式会社のお問い合わせ窓口にご相談ください。
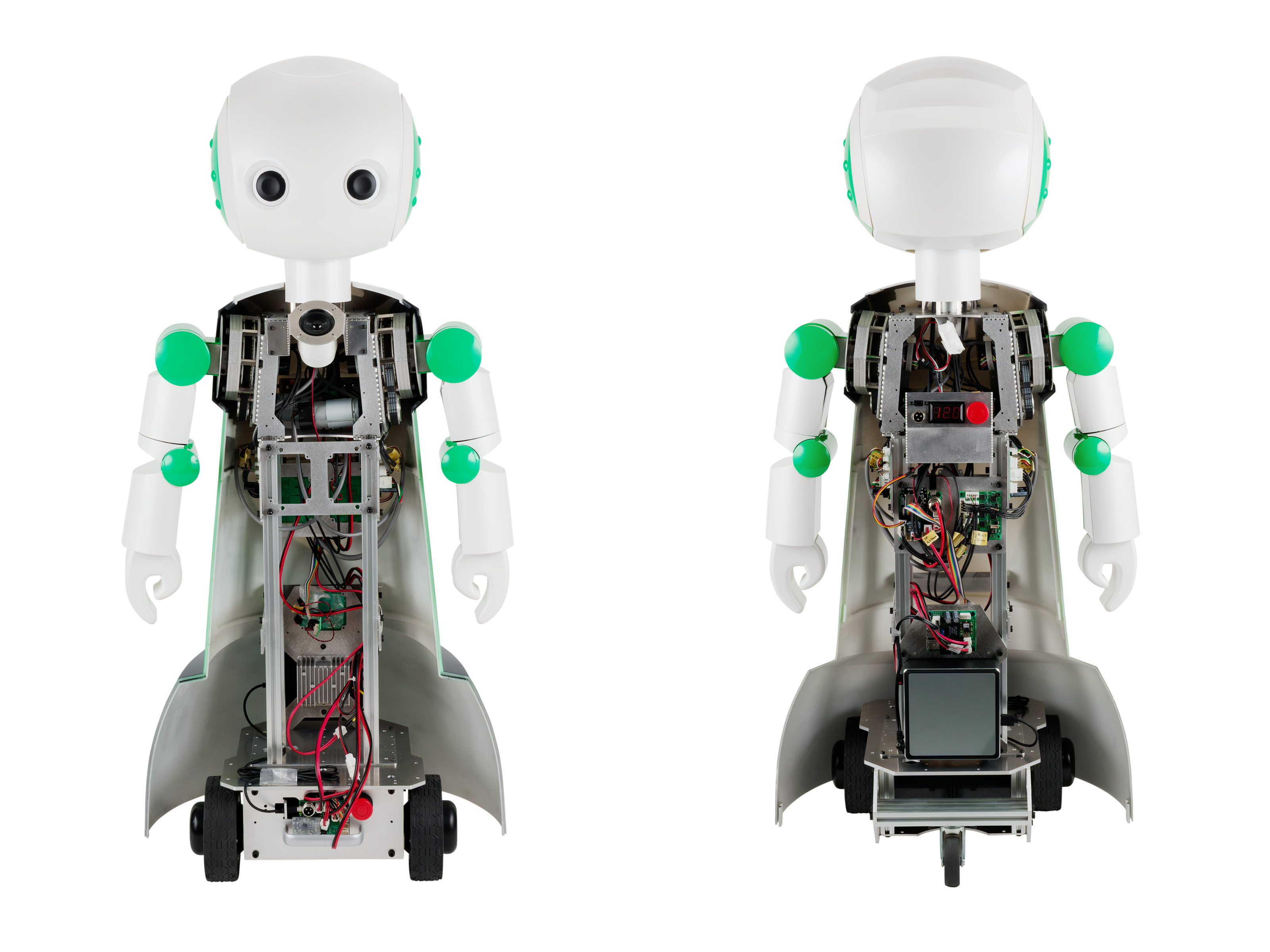
背面に電圧表示と非常停止スイッチを標準搭載

背面に電圧表示と非常停止スイッチを標準搭載
03 高い走破性能と、高速な走行を実現
Robovie-R4は、点字ブロック程度の段差であれば走破できる走行性能を実現しています。コミュニケーション研究のフィールドとして、より人間が生活する環境に近いものとすることができ、研究開発の幅が大きく広がります。また、最大速度は実測で1.6m/sとなっており、歩行する人間と併走するなどの活用も可能です。
※あらゆる段差を乗り越えられるものではありません。また、走行速度は、平面において直線走行させた場合の最高速度です。転倒のおそれがあるので、段差がある環境や旋回動作を行う場合には、走行速度を遅くさせるなど、十分な安全対策を行ってください。本製品は屋内専用です。屋外での使用は想定しておりません。

Robovie-R4 走行イメージ
※本製品は屋内での使用のみを想定しています。また、大型の機体のため、開発や運用には十分な注意をお願いいたします。
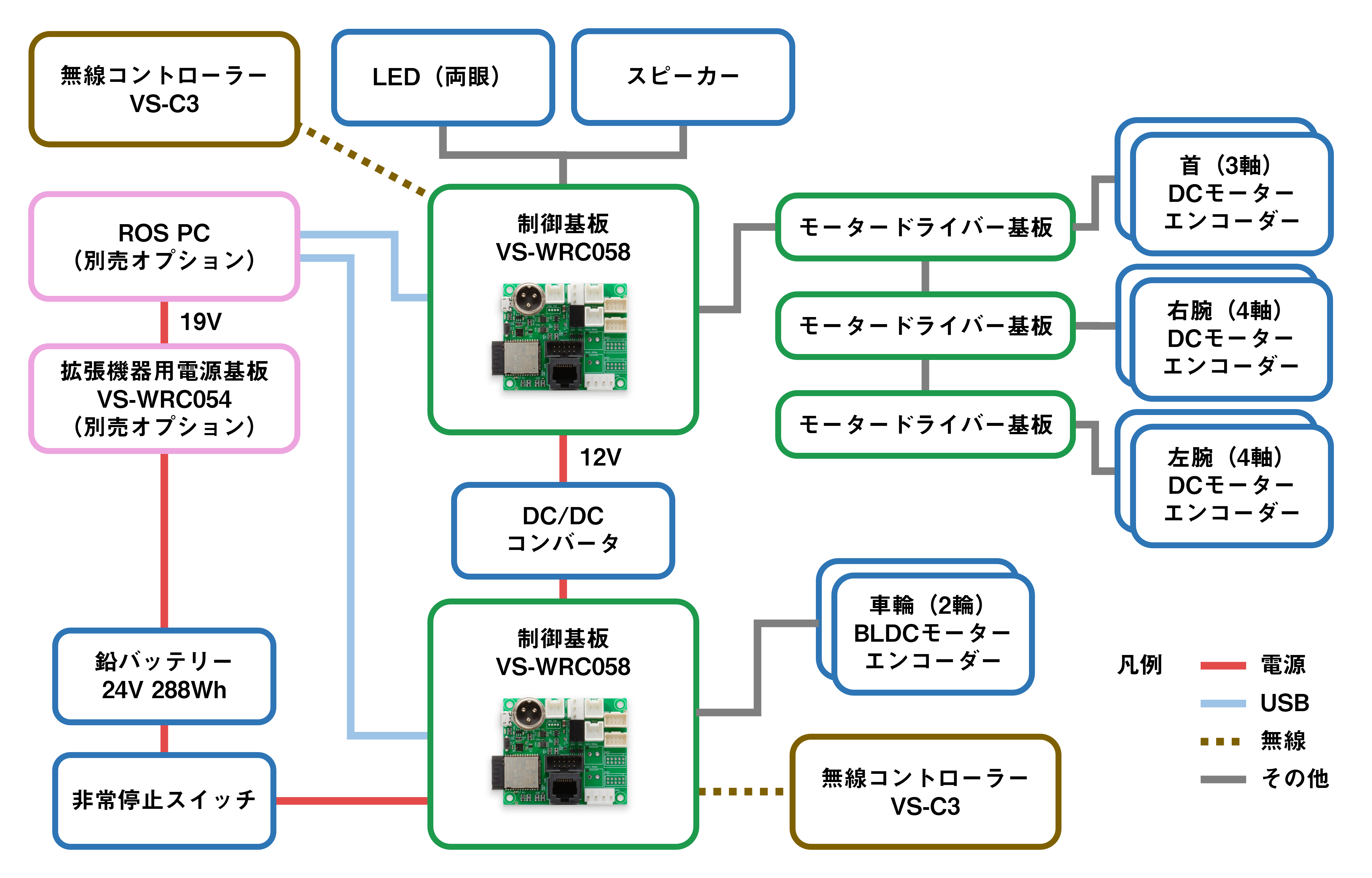
04 2個のCPUボードを搭載
本製品には台車部分(メガローバーVer.3.0に相当)と上半身部分とに、それぞれCPUボード「VS-WRC058」が搭載されています。台車ロボットであるメガローバーVer.3.0にそのまま上半身部分を搭載した構造となっているといえるため、既にメガローバーVer.3.0を運用している環境においては、プログラムの共用といった観点で、Robovie-R4をスムーズに導入することができます(なお、メガローバーVer.3.0に搭載しているオプション部品について、Robovie-R4にはそのまま搭載できないケースも想定されるため、十分にご確認いただくことをおすすめします)。
VS-WRC058は、ESP-IDF(上半身)あるいはArduino IDE(台車)を用いた制御プログラムの作成に対応しています。ROSに対応したファームウェアについては、製品に付属したものをユーザー自身の手でカスタマイズすることも可能です。
05 ROS1による制御に対応
Robovie-R4はROS(ROS1)メッセージ通信に対応しており、ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、rosserialのパッケージを用いたROS1のメッセージ通信が可能です。
上半身部分のROS対応について
ROS側からRobovie-R4に対して目標ポーズ(各軸の目標角度)やLED制御コマンドを送信可能です。また、Robovie-R4に搭載された各エンコーダー値を取得することも可能で、多数の軸が搭載された構造でありながら、容易に制御することができます。
台車部分のROS対応について
メガローバーVer.3.0の仕様に準じます。
また、本製品には3Dシミュレーターである「Gazebo」用のモデルが標準で付属しており、モーションプランニングフレームワークである「MoveIt」にも対応しています(目的の動作内容によっては、サンプルコードに含まれない開発が追加で必要となる場合があります)。
なお、ROSを動作させるデバイスは別途ご用意いただく必要があります。弊社で推奨するデバイスの動作環境は次の通りです(本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります)。
【ROS使用時の推奨動作環境】
| OS | Ubuntu20.04 (64bit) |
| ROS | ROS Noetic |
| CPU | AMD Ryzen. 5 3550H |
| メモリ | 16GB |
| ストレージ | M.2 SSD 250GB |
| グラフィック | Radeon. Vega 8 Graphics |
※上記条件を満たしていても、相性などにより、正常に動作しない場合があります。
※仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
06 専用の無線コントローラーで簡単操作
本製品にはゲームパッド型無線コントローラー「VS-C3」が付属します。PC等を接続しなくてもRobovie-R4を無線操縦することができ、目的に応じた手動での操縦や動作確認等、幅広く活用が可能です(なお、VS-C3は上半身用と台車用との2個が付属します)。
07 容易に開発が可能なプログラム作成環境を付属
Robovie-R4には、ブロックプログラミング式のGUIツールである「Motion Works for VS-WRC058」が付属します。GUIを用いた扱いやすいツールでありながら、条件分岐や変数演算を用いた高度なモーションを作成可能です(Motion Works for VS-WRC058は、Robovie-R4の上半身にのみ使用可能です。台車部分には使用できません)。
Motion Works for VS-WRC058で作成したモーションプログラムは、ファームウェアの形でVS-WRC058に書き込んで動作させます。付属する無線コントローラーであるVS-C3を用いた操縦を行うことも可能です。なお、Robovie-R4の上半身を制御するVS-WRC058については、ROS対応のファームウェアとMotion Works for VS-WRC058対応のファームウェアの2種が用意されています。
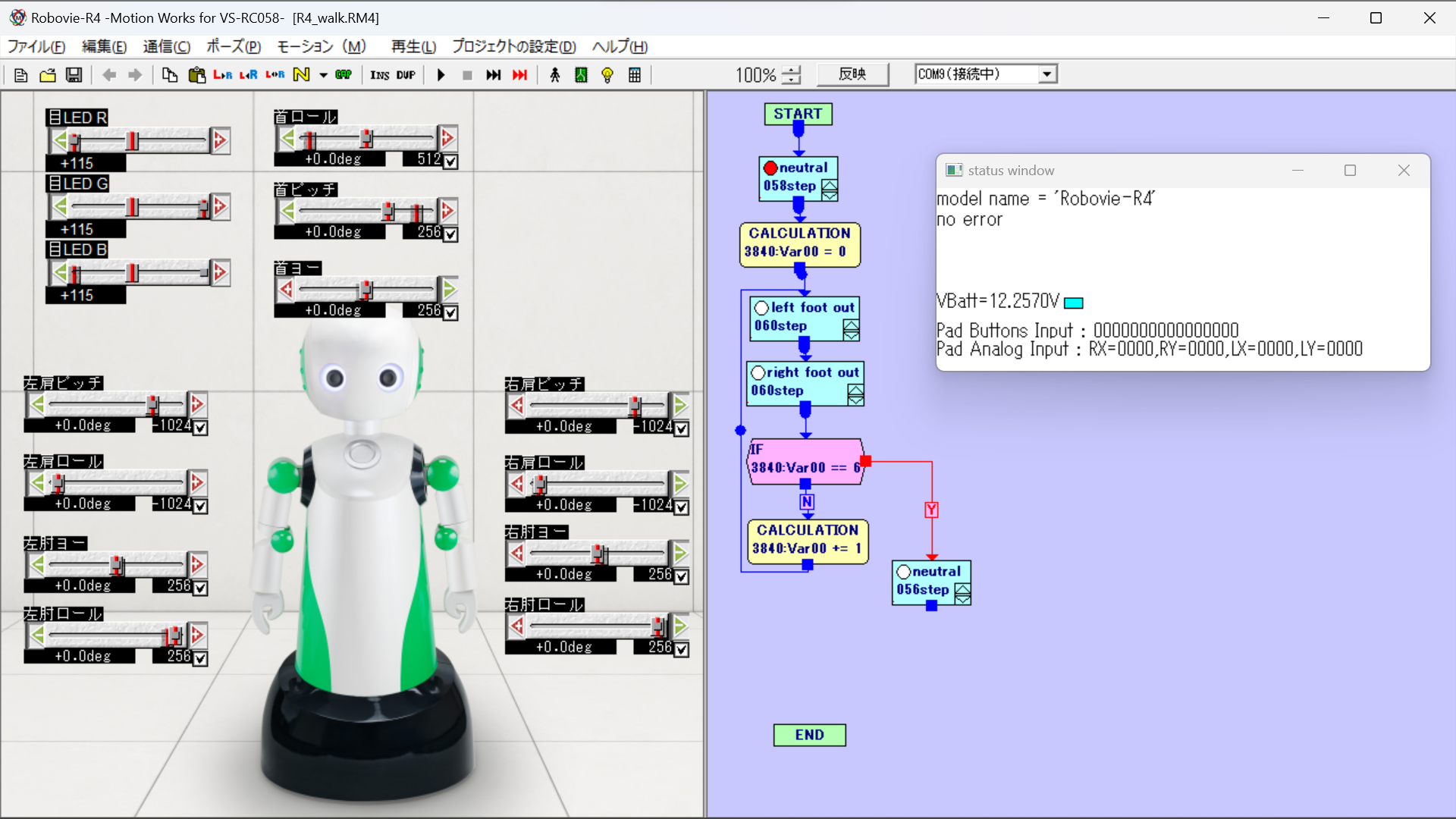
「Motion Works for VS-WRC058」を付属
8構成図
9本体仕様
| サイズ | W500×D500×H1080 (mm) |
| 本体重量 | 約30kg(ROS PC(UM350)およびVS-WRC054搭載時) |
| バッテリー | 24Vシール鉛バッテリー 288Wh |
| 自由度 | 13軸 (車輪:2 / 腕部:4軸×2 / 頭部:3軸) |
| モーター | BLDCモーター 40W×2 / DCモーター×11 |
| エンコーダー | インクリメンタルエンコーダー×13 |
| 最高速度(実測値) | 1.6m/s |
| 乗り越え可能段差高 | 1.2cm(弊社内での試験による参考値です) |
| 制御基板 | VS-WRC058×2 |
| 入出力 | スピーカー×1 / LED(目:2) |
| SDK(上半身) | VS-WRC058用 ESP-IDFファームウェア(ROS対応ファームウェアのみ)、ROSパッケージ |
| SDK(台車) | VS-WRC058用 Arduinoライブラリー、ROSパッケージ |
| 収録サンプル ※本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります |
上半身:ESP-IDFファームウェア(ROS対応ファームウェアのみ) 下半身:Arduinoライブラリー 車輪制御 / エンコーダー読み取り / 各種通信機能等 ROS用サンプルコード ゲームパッドからの操作 マウス(タッチパッド)からの操作 MoveItからの操作 |
| インターフェース | USBシリアル、Wi-Fi |
| 付属品 | VS-C3×2、充電器 |
| 注文時オプション | 拡張機器用電源基板 VS-WRC054 ROS PC(UM350) |
※本製品は屋内専用です。屋外での使用は想定しておりません。また、製品の仕様は予告なく変更となる場合があります。
※VS-WRC058をArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.13以上が動作する環境が必要です。
