ヴイストン株式会社

01ダウンロード情報
ダウンロードリスト
02ビュートローバー組み立てマニュアル
ビュートローバーの組み立てマニュアルは下記よりダウンロードできます。
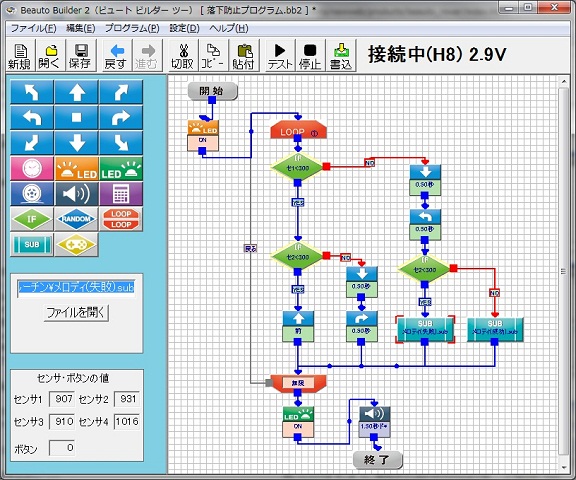
03ビュートローバー用プログラミングソフトウェア「ビュートビルダー2」
ビュートビルダー2は、ビュートローバーをPCと接続してプログラミングを行なうためのソフトウェアです。現在の最新版は以下よりダウンロードできます。
ロボットに、C言語などで作成したプログラムを書き込んだ場合、そのままではビュートビルダー2は使用できません。必ずビュートビルダー2用のファームウェアを、ロボットに書き直してからお使いください。
■更新履歴
Release8(2012/10/17):一度シリアル通信した後にH8でのHID接続ができないバグを修正
Zip圧縮バージョンは、学校などでソフトウェアがインストールできない用、PCに制限がかかっている場合に使用するものです。通常はインストーラバージョンをご使用ください。
ビュートビルダー2をはじめて利用される方は、取扱説明書の「チュートリアル」からご覧ください。
04ビュートローバーH8用ファームウェア
ビュートローバーH8のCPUボードをビュートビルダー2に対応したプログラムに書き換えるためのファームウェアは下記よりダウンロードできます。
ファームウェアのアップデートについては、BeautoBuilder2取扱説明書(PDF)の「ファームウェアのアップデート」を参照してください。
■更新履歴
バージョン2.0(2010/9/27): 書きこめるプログラムのサイズを改善
バージョン1.0(2010/7/28): 初版
Bluetoothデバイス「VS-BT001」,「VS-BT003」専用ファームウェア
ビュートローバーH8を、Bluetooth通信デバイス「VS-BT001」または「VS-BT003」で通信接続する場合は、以下のファームウェアを書き込んでください。なお、以下のファームウェアを書き込むと、USBでの通信はできなくなりますのでご注意ください(再びUSBで通信する場合は、通常のファームウェアを書き直してください)。
ファームウェアのアップデートについては、BeautoBuilder2取扱説明書(PDF)の「ファームウェアのアップデート」を参照してください。
■更新履歴
バージョン2.0(2012/12/28): VS-C2 for Androidとの通信に関する問題を修正
バージョン1.0(2011/4/8): VS-BT001との接続に対応
05ビュートローバーARM用ファームウェア
ビュートローバーARMのCPUボードをビュートビルダー2に対応したプログラムに書き換えるためのファームウェアは下記よりダウンロードできます。
ファームウェアのアップデートについては、BeautoBuilder2取扱説明書(PDF)の「ファームウェアのアップデート」を参照してください。
■更新履歴
バージョン6.0(2013/12/18): ch3モータの動作に関する不具合を修正
バージョン5.0(2012/4/11): ビュートミニARM用ファームウェア初版
バージョン4.0(2011/4/8): Bluetooth通信デバイス「VS-BT001」に対応
バージョン3.0(2011/1/21): エンコーダが動作しない不具合を修正
バージョン2.0(2011/1/13): VS-C1が動作しない不具合を修正
バージョン1.0(2010/12/10): 初版
06参考資料・C言語開発環境・サンプルソースなど
製品の参考資料やC言語開発環境・サンプルソースなどの上級者向けのデータは、CPUボード単体のサポートページにて情報を公開しております。お手数ですが、以下のリンクより各サポートページへお進みください。
VS-WRC003LV
VS-WRC103LV
07オプション製品関係
オプション製品の説明書・資料です。
