ヴイストン株式会社

本製品は、生産・販売を終了いたしました。
01頭脳をまるごと載せ替え可能なフルオンライン・プラットフォームロボット


Androvie(アンドロビー)は、頭部にスマートフォンを搭載可能な小型二足歩行ロボットの研究開発プラットフォームです。搭載したスマートフォンからの制御も可能で、3G接続、GPS、Wifi、Bluetoothなどの多彩な機能を駆使して、高度な自律・遠隔操作プログラムを作成可能です。
ハードウェアの設計は、42.195kmの連続走行の実績があるRobovie-PC(ロボビーPC)を基に行い、高い堅牢性を誇ります。
単体でネットワークに接続できるロボットを低コストで実現するために、スマートフォンを搭載可能なロボットとして開発いたしました。
03製品の特長について
Androvieには、下記の特長が備わっています。
スマートフォンを頭部に搭載!

 Androvieには、頭部に任意のAndroidスマートフォン(別売)を搭載可能です。
これまでに発売された多くのロボットは、搭載されたCPUボード専用にプログラミングを行う必要がありました。また、様々なセンサや通信機器を使用するためには、CPUボードとの接続やドライバの作成などの作業が必要で、処理性能を向上させるためにCPUボードのアップグレードを行う場合、ロボット丸ごとの交換が必要な場合がほとんどでした。
Androvieには、頭部に任意のAndroidスマートフォン(別売)を搭載可能です。
これまでに発売された多くのロボットは、搭載されたCPUボード専用にプログラミングを行う必要がありました。また、様々なセンサや通信機器を使用するためには、CPUボードとの接続やドライバの作成などの作業が必要で、処理性能を向上させるためにCPUボードのアップグレードを行う場合、ロボット丸ごとの交換が必要な場合がほとんどでした。
しかし、Androvieは様々な機能がパッケージされたスマートフォンを丸ごと搭載できるため、煩わしい機器の接続作業は必要ありません。日進月歩で進化する高性能CPUにアップグレードする作業も、スマートフォンを載せ替えるだけと非常に簡単です。また、Androidという標準化されたOS上でアプリを動作させるため、多くのアプリはアップデート後もそのまま使用可能です。
スマートフォンに搭載された様々な機能を使用可能!
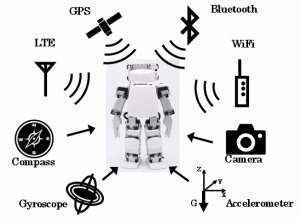 近年のスマートフォンには、常時接続で高速なLTE通信、WiFi、Bluetooth、高精細カメラ、コンパス、ジャイロスコープ、加速度センサ、GPS、ディスプレイ等の様々な機能が搭載されています。Androvieでは、それらをロボットの機能として簡単に使用可能です。
近年のスマートフォンには、常時接続で高速なLTE通信、WiFi、Bluetooth、高精細カメラ、コンパス、ジャイロスコープ、加速度センサ、GPS、ディスプレイ等の様々な機能が搭載されています。Androvieでは、それらをロボットの機能として簡単に使用可能です。
例えば、スマートフォンには3Gが搭載されているため、WiFiのエリアに縛られない広い行動範囲を持つ遠隔操作ロボットを実現できます。更に、スマートフォンがLTE対応であればより高速な通信が可能なため、高精細な映像による遠隔操作が可能です。また、GPSを用いて自分の位置を取得することも簡単に実現できます。
作成したアプリは通常のAndroidアプリと同じように、Google Playに掲載して配信することも可能です。そのため、独自のソフトウェア配信インフラを構築せずとも、自動でソフトウェアをアップデートすることも簡単になります。
高い運動性能
 脚の軸構成を、片脚でピッチ軸×3、ロール軸×2、ヨー軸×1とヒューマノイドロボットとして自由度の高い6自由度とし、移動性や動作の多様性を確保しています。
脚の軸構成を、片脚でピッチ軸×3、ロール軸×2、ヨー軸×1とヒューマノイドロボットとして自由度の高い6自由度とし、移動性や動作の多様性を確保しています。
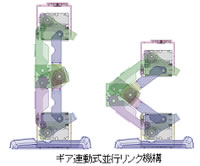
また、負荷の大きな膝は「ギア連動式並行リンク機構」を採用し、1個のハイトルクサーボで脚の伸縮を制御。これにより高い自由度と優れた歩行安定性を両立しています。
二足歩行ロボットによるフルマラソン走行競技「第2回ろぼまらフル」では、この機構を搭載したAndrovie試作機が45時間48分07秒かけて42.195kmを完走しました。
柔軟外装
転倒時などに内部の精密な電子部品を保護するため、柔軟な外装を標準装備しました。発泡ウレタンスポンジを採用し、軽量でありながら柔軟で、自由度の高い デザインを実現しています。
04ロボット構成図
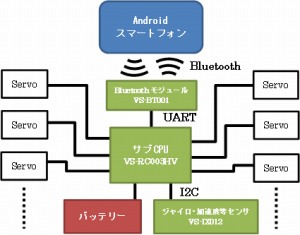
ロボット本体には、モータ制御用のサブCPUを搭載し、スマートフォンとの通信はBluetoothで行います。
サブCPUは、ロボットの運動制御を行います。歩行などの各種モーションや、ジャイロ・加速度センサによるセンサフィードバックがモジュールとして組み込まれており、スマートフォンからは細かい運動制御を行う必要なく簡単なコマンド送信でモーションを呼び出して操作できます。サブCPUのモーション登録やセンサフィードバックのゲイン設定等は、専用のモーションエディタ「RobovieMaker2」から行います(WindowsPCを使用)。
03バリエーション・注文時オプション構成
- Androvie(税抜 280,000円)
- Androvie(HHT) (税抜 470,000円)
- Androvie(FHT) (税抜 610,000円)
膝2軸のみハイトルクサーボで構成された標準モデルです。
足回りの10軸にハイトルクサーボを使用したモデルです。
頭の軸2軸以外のすべての軸にハイトルクサーボを使用したモデルです。
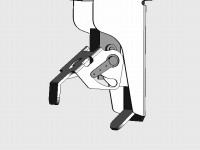
- グリップハンドオプション(税抜 18,000円)
物をつかむことが出来るグリップハンドを両手に搭載し、小型のサーボと過負荷防止機構を採用しました。

- 肘ヨー軸追加オプション(税抜 12,000円)
肘部分にヨー軸サーボを追加します。腕をさらに自由に動かすことが可能になり、モーションの表現力が向上します。
05発売・購入について
- 製品仕様につきましては、こちらの製品仕様紹介ページをご参照ください。
- ご注文につきましては、こちらの購入案内ページをご参照ください。
実績第2回ろぼまらフルにて、45時間48分07秒をかけて42.195kmを完走!
2011年12月3〜4日、及び10〜11日に開催された、二足歩行ロボットによるフルマラソン(42.195km)走行競技「第2回ろぼまらフル」にて、Androvie(試作機)が45時間48分07秒かけて完走しました。第1回の記録(54時間57分50秒)を約9時間更新しました。
- 日時:2011/12/3(土) 10:00〜12/4(日) 20:00、12/10(土) 10:00〜12/11(日) 20:00
- 場所:ATC(アジア太平洋トレードセンター) ITM棟 11階 特設広場
競技結果
- チームAndrovie(ヴイストン株式会社 45時間48分07秒
- チームPC(ヴイストン株式会社) 48時間27分53秒
- チームYOGOROZA(掴み隊) 59時間29分00秒
- 大阪工業大学 堅脚会 67時間37分56秒
- 財団法人 大阪労働協会 30.300kmでタイムアップ
- 藪研究室チーム(大阪府立大学工業高等専門学校) 13.600kmでタイムアップ


競技結果などの詳細は第2回ろぼまらフル 公式webページをご参照ください。

