本製品の後継機「メカナムローバーVer.3.0」を発売いたしました。
「メカナムローバーVer2.1」は、「メカナムローバーVer2.0」の後継機種となる4輪駆動の研究開発用台車ロボットです。
メカナムホイールによって、全方向への平行移動が可能です。
アルミフレームの高剛性なロボットとなっており、可搬重量は40kg、最高速度は1.3m/sを実現しています。
Wi-Fi / BLE / Bluetooth Classicの無線通信規格と、USBシリアル通信に対応しており、PCやタブレット、Raspberry Piなどから制御できます。
また、ROSを使った制御に対応しております。
制御ボードには、Arduino互換ボード「VS-WRC051」を搭載しており、Arduino IDEを用いてプログラムすることで動作させることも可能です。
高い運動性能と大きな積載重量をもつ全方向移動ロボット
メカナムローバーVer2.1は4輪のメカナムホイールを駆動輪として使用しています。
そのため、前後方向の移動や旋回動作だけでなく、左右方向や斜め方向への平行移動が行えます。
各ホイールにはサスペンションが装備されているため、1cm程度の段差であれば各輪が確実に接地し、安定した走行を実現します。
電源は、大型の鉛バッテリーを搭載。バッテリー駆動時間が21時間以上(*)と長く、実験等をスムーズに行うことができます。
※0.3m/sでの定速走行による参考値です。
専用の無線ゲームパッドで簡単操作
製品に付属の無線コントローラー「VS-C3」を使用すれば、PC 等を接続しなくても、メカナムローバーを無線操縦することができます。
手動操縦で動作させる際や動作確認等にお使いいただけます。
無線操縦の様子はこちら
無線/有線接続で制御
メカナムローバーVer2.1は、Wi-Fi / BLE / Bluetooth Classic の3種の無線通信と、有線の USBシリアル通信に対応しています。
指定のコマンドを用いることで、PCやタブレットなど、様々なデバイスからメカナムローバーVer2.1を制御することが可能です。
また、Raspberry PiのGPIOソケットと互換のコネクタが搭載されているため、ロボット本体にRaspberry Piを簡単に搭載することができ、制御にも使用することができます。
ROSメッセージ通信でコントロール
メカナムローバーVer2.1は、ROS メッセージ通信に対応しています。
ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、ROSを使った制御が可能となります。
ROSメッセージ通信を使うことで、速度や旋回量の指令値を、わずか数行のコードでメカナムローバーに送信することができます。
導入ドキュメントと以下のサンプルプログラムが付属するため、初心者の方でも、ROS環境で制御システムを作成し、簡単に動かすことができます。
※ROSを動作させるデバイスは別途ご用意いただく必要があります。
※弊社で推奨するデバイスの動作環境は後述の通りです。
【ROSサンプルプログラム一覧】
- ゲームパッドからの操作
- SLAM(gmapping)
- navigation
- マウス(タッチパッド)からの操作
- SLAM(cartographer)
※本製品に含まれないライブラリなどのセットアップが追加で必要になる場合があります。
※SLAM、navigationを行うためには LRFが必要です。
Arduino IDEでプログラム可能
メカナムローバーVer2.1の制御ボードである「VS-WRC051」には、Arduino互換のマイコンESP-WROOM-32が搭載されています。
そのため、Arduino IDEを用いてメカナムローバーVer2.1の制御プログラムを作成することができます。
製品付属のライブラリには、モーター制御関数や通信関数が含まれていますので、少ない開発負担で制御プログラムを作成することが可能です。
※VS-WRC051をArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.9以上が動作する環境が必要です。
メカナムローバーVer2.0からの変更点
従来モデルであるメカナムローバーVer2.0からの主な変更点は以下の通りです。
- 電流制御回路の追加
- モーター電流制御回路を追加することで、より細かな制御ができるようになり、過負荷にも強くなりました
- 通信経路の対ノイズ性能向上
- 本体内の通信経路について、対ノイズ性能を向上させました。運用の安定性向上が見込めます
ハードウェア構成
外形寸法図
Vstone公式YouTubeチャンネル
YouTubeチャンネルにて、弊社製品を題材とした解説動画や活用動画などを配信しております。
毎週配信を目標に取り組んでおりますので、動画をお楽しみ頂けましたらチャンネル登録・高評価をお願いします!!
Vstoneチャンネルはこちら
【その他解説動画】
製品仕様
| サイズ | 398(L)×349(W)×166(H)mm |
|---|
| 本体重量 | 約20kg |
|---|
| 可搬重量 | 40kg |
|---|
| 本体材質 | アルミニウム |
|---|
| 最高速度(実測値) | 1.3m/s |
|---|
| バッテリー | 12Vシール鉛 312Wh |
|---|
| 稼働時間(目安) | 約21時間※使用状況によります。 |
|---|
| 駆動方式 | 4輪駆動メカナムホイール、サスペンション搭載 |
|---|
| タイヤ直径 | 152mm |
|---|
| モーター | DCモーター 40W×4 |
|---|
| 回転検出 | エンコーダ |
|---|
| 制御基板 | VS-WRC051 |
|---|
| SDK | VS-WRC051用 Arduinoライブラリ、ROSパッケージ |
|---|
| インターフェース | USBシリアル、Wi-Fi、Bluetooth Classic、BLE |
|---|
| 収録サンプル |
Arduinoライブラリ
ROS用サンプルコード
- ゲームパッドからの操作
- マウス(タッチパッド)からの操作
- SLAM(gmapping)
- SLAM(cartographer)
- navigation
※本製品に含まれないライブラリなどのセットアップが追加で必要になる場合があります。
|
|---|
| 付属品 | 充電器、無線コントローラー |
|---|
| 注文時オプション | レーザーレンジファインダー、前後バンパー、全周囲バンパー、拡張機器用電源基板、Raspberry Pi 4B 2GB版、非常停止スイッチ、ワイヤレス充電、ROS PCなど |
|---|
※製品仕様その他は、予告なく変更する場合がございます。
※開発環境やROS環境はお客様にてご準備ください。
ROS使用時の推奨動作環境
下記条件を満たしていても、相性などにより、正常に動作しない場合があります。
仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
| OS | Ubuntu 16.04 (64bit) | Ubuntu18.04 (64bit) |
|---|
| ROS | ROS Kinetic | ROS Melodic |
|---|
| CPU | Core i5 7200U | Core i5 8259U |
|---|
| メモリー | DDR4 PC4-17000 4GB | DDR4 PC4-19200 8GB |
|---|
| ストレージ | SSD 128GB | M.2 SSD 256GB |
|---|
| グラフィック | Intel HD Graphics 620 | Intel Iris Plus Graphics 655 |
|---|
各種ダウンロード
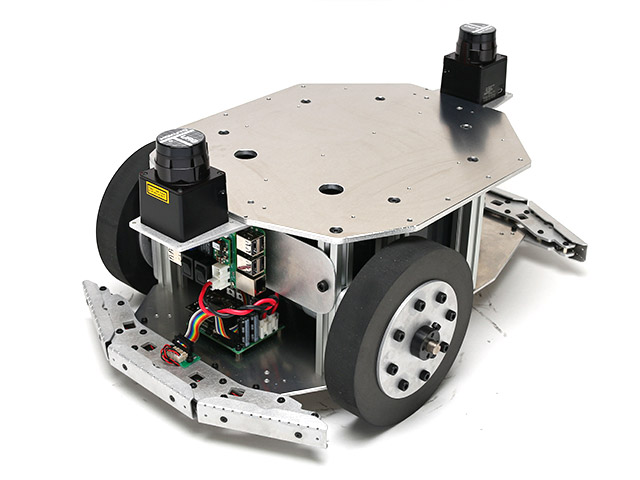
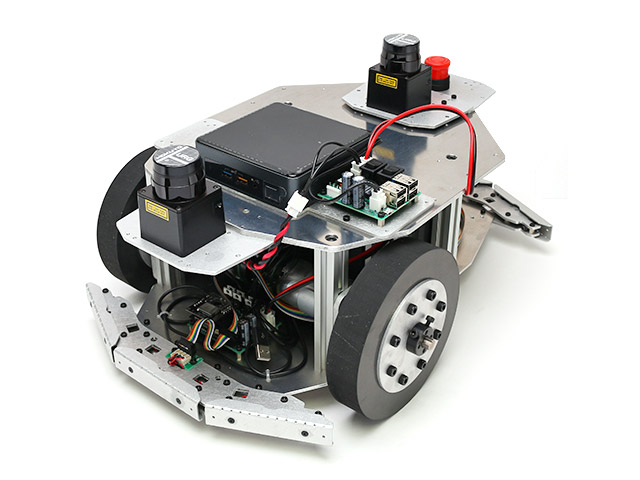
購入時オプション一覧
ご注文時にご依頼いただく事で、様々なオプションを取り付けた状態で発送いたします。
固定スペースと取り付けの仕様上、オプション品の組み合わせによっては通常とは異なる位置にオプション品を取り付ける場合がございます。
下記に取り付けの参考画像を掲載しておりますので、事前に取り付け位置の確認をしたい場合は、お問い合わせください。
※Jetson AGX Xavier™搭載オプションにつきましては、入荷予定が立っていない為、現在は受注を受け付けておりません。

LRFのみ

LRF前+非常電源
LRF+ラズパイor拡張機器基板
オプション満載
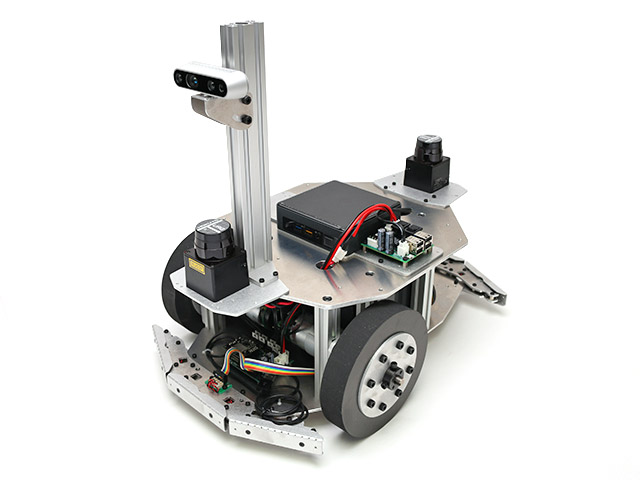
LRF+カメラステー
【実用事例】
株式会社アーク様
新しさと親しみやすさをもった、手荷物輸送ロボット RAXii(ラクシー)
デザイン・設計技術を主軸とした製品意匠のカスタム開発サービス、簡易金型/型レス工法による小ロット樹脂製品の提供を事業とする株式会社アーク様より、大型商業施設で活躍するロボットのデザイン展開事例として、その駆動部分にメカナムローバーをご採用いただきました。
株式会社アーク
カスタマイズのご案内
研究開発用台車ロボットは、標準機では仕様を満たさない、別途機器を搭載して研究をしたいといった企業様向けに、ご要望に合わせたハードウェアのカスタマイスが可能です。カスタマイズにおける費用、納期については要件ごとに異なりますので、まずはお気軽にご相談ください。
お問い合わせはこちら
※なお、お客様独自のシステムに関する開発・サポートは行っておりません。
- カスタマイズ事例
- A社:稼働時間を長くするためにバッテリーを増設
- B社:積載重量300㎏用にハードウェアの設計
- C社:別途機器を搭載するための取り付け穴を天板に追加工
- D社:別途機器を搭載するのためのやぐらの設計、取り付け
- E社:オプション品のLRFではなくユーザーが指定するLRFを取り付け
- F社:より強力なモーターへの変更

拡張用部材の搭載例(追加工無し)
よくあるご質問(FAQ)
- 製品のCADデータ・その他部品のCADデータは提供してもらえますか?
- 研究開発用台車ロボットシリーズにつきましては、製品本体、部品等のCADデータは提供しておりません。ご購入後にPDF形式の三面図データは提供可能です。
- 取扱説明書等はどのように入手できますか?
- 専用ページよりダウンロードいただけます。専用ページの情報は本体に同梱の案内用紙に記載されております。
- 屋外での使用はできますか?
- 研究開発用台車ロボットシリーズは屋内での使用を想定した機器となっております。そのため、防塵性能や防水性能は有しておりません。 また、屋外での使用についてはサポート対象外となります。
- 制御ソフトウエアのサポートは対応可能ですか?
- お客様独自の作業を要する事項についてはサポート対象外となります。
- 本製品を購入後、追加オプションの付加を行うことは可能でしょうか?
- 取付作業を弊社で実施する場合は、製品発送の送料及び取り付け費用を別途ご負担いただくことで対応可能です。オプションの内容により取り付け費用は異なりますので、まずはお問い合わせフォームよりご連絡ください。
【交換方法の解説動画はこちら】
- 天板への追加工やホイールベースの変更等は可能でしょうか?
- 内容によっては特注としてお受けできます。カスタマイズ事例をご確認の上、お問い合わせフォームよりご相談ください。
- Raspberry Pi設定に関するドキュメントはありませんか?
- Raspberry Piのセットアップに関する部分につきましてはサポート対象外とさせていただいております。Raspbianを使用される場合は、公式ドキュメントご参照ください。ROSberryPi
- 実機を見ることはできますか?
- ヴイストン株式会社の大阪本社にはデモ機がございますので、法人様に限りデモを行うことは可能です。
ご希望の方は事前にお問い合わせフォームよりご相談ください。
※現状、新型コロナウイルス感染症の影響によりWEB通話対応にて実施しております。
Ubuntuは、Canonical Ltd.の商標または登録商標です。
Arduinoは、Arduino AGの登録商標です。
Wi-Fiは、Wi-Fi Allianceの登録商標です。
Bluetooth®は、Bluetooth SIG, Inc. USAの商標または登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の商標または登録商標です。