最新32ビットARMマイコン「LPC1343」を搭載
ARMマイコンは世界で多くの機器に採用されており、国内でも益々普及することが予想されています。
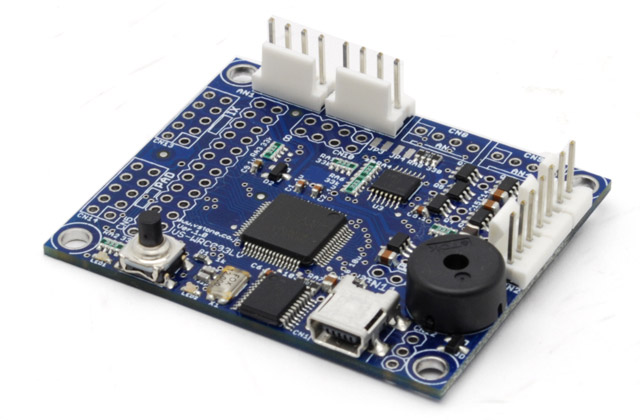
本製品のCPUボード「VS-WRC103LV」には、NXPセミコンダクターズ社製のCortexM3コアを採用したARMマイコン「LPC1343」(72MHz)を搭載しております。VS-WRC103LV はLED、モーター、センサー入力を備え、単体でもプログラミング学習が可能です。
2通りの方法でプログラミング学習が可能
ビュートローバーARMには、専用プログラムソフトウェア「ビュートビルダー2(Beauto Builder2)」が付属しております。このソフトウェアは、フローチャート形式に類似した分かりやすいインタフェースを採用しており、前進・旋回や条件分岐などの命令ブロックを置いていくことでプログラムを作成します。フローチャート形式のプログラムでロボットを制御することにより、プログラミングの概念やアルゴリズムを学習することが出来ます。
C言語学習には、無償の開発環境LPCXpressoや、デバッガとしてLPC-LINK が利用でき、弊社が公開するサンプルコードや、入門向けのテキスト(2018 年改訂)を用いて、
簡単にARMマイコンの組み込みプログラミング学習が行えます。作成したプログラムの書き込みも別途開発ツールを用意する必要はなく、付属のUSBケーブルで接続することで書き込みができます。
自宅学習でプログラミングを先取り!
ものづくりに最適なプログラミング学習教材
ビュート ローバーは、中学校の技術・家庭科「計測と制御」や高校教科「情報」の教材として、また、大学や社会人向けの組み込み学習用として適したプログラミング教材ロボットです。
本体には赤外線センサーを2個搭載し、障害物検知・ライントレース・赤外線ボールの追跡などのプログラムを作成することができます。さらに拡張性にも優れているため様々なロボットに組み換えることも可能です。
組み換え自在、ものづくり教材
メインフレームを5mmピッチのユニバーサルプレート状にしたことで、センサー位置の変更や新たな部品の取り付けなどの改造が容易にできます。また、ギアボックスにタミヤ製ダブルギアボックスを採用し4通りのギア比に組み換えが可能です。多彩な拡張パーツによりレスキューロボットや全方向移動ロボット、無線操縦ロボットや競技会用ロボットなどにご活用いただけます。
【ビュートローバーARMとH8の違い】
|
ARM |
H8 |
こんな方にオススメ
(※通常の用途であれば、ビュートローバーARMとH8は同様にお使いいただけます。) |
C言語で本格的に開発したい方 |
どちらかというと初心者向き(書籍とセットがお勧め) |
| C言語開発環境 |

LPCXpresso
(NXPセミコンダクターズ社製) |
HEW
(ルネサス エレクトロニクス社製) |
| 処理速度(動作周波数) |
72[MHz] |
12[MHz] |
| 普及について |
ARMマイコンにはさまざまな種類があり、携帯ゲーム機、スマートフォンなどによく用いられる |
開発環境に日本語が含まれているため初学者に扱いやすく、教育現場での指導にもよく用いられる |
| デバッガ |
LPC-LINK (拡張基板不要) |
E8aデバッガ (拡張基板が必要) |
| 教本 |

ARMマイコンによる組込みプログラミング入門 ロボットで学ぶC言語(改訂2版) |

ロボットプログラミング大作戦 |
【NEW】ビジュアルプログラミングツールに新対応
新学習指導要領で必修化された小学校でのプログラミング教育に活用可能なWEBサイト「プログラムランド」は、
Scratchライクなビジュアルプログラミングツールです。
この度、WEBサイト上で作成したプログラムをビュートレーサーの専用ソフト
である「Beauto BuilderR」用のプログラムに出力する機能を搭載しました。
初学者向けのプログラミング実況動画を配信中小学生向けプログラミング解説(youtube)
プログラムランドの利用イメージ
製品仕様
| サイズ | 112(W)×130(D)×57(H)[mm] |
|---|
| 重量 | 約200g(バッテリー搭載時) |
|---|
| 駆動モーター | DCモーター×2(本体駆動用×2) |
|---|
| CPUボード | VS-WRC103LV |
|---|
| センサー入力 | 赤外線距離センサー×2(アナログ入力センサー×最大4まで増設可能) |
|---|
| 他出力 | LED×2、圧電ブザー×1 |
|---|
| 電源 | 単三アルカリ乾電池×2本(別売) |
|---|
| 対応OS | Windows7/8/8.1/10(日本語版) |
|---|
| インタフェース | USB(HID準拠) |
|---|
| 付属品 | CD-ROM(説明書・ソフトウェア)、USBケーブル |
|---|
CPUボード仕様
| 型番 | VS-WRC103LV |
|---|
| CPU | NXPセミコンダクターズ製ARM CortexM3[LPC1343(32ビットマイコン)] |
|---|
| 動作周波数 | 72MHz |
|---|
| ROM | 32kバイト |
|---|
| RAM | 8kバイト |
|---|
| ソフトウェア | ビュートビルダー2(無償) |
|---|
| C言語プログラミング | 開発環境「LPCXpresso」(無償) |
|---|
| インターフェース | USB(HID)、仮想COMポートによるシリアル通信も可能 |
|---|
| プログラムの書き込み | 専用ソフトウェア不要(USBメモリのような方式で書き込み可能) |
|---|
※本製品をご利用になる場合は、Windows7/8/8.1/10をインストールしたPC、及び一般的なPCの操作知識が必要となります。
※製品仕様その他は、予告なく変更する場合がございます。
【学習方法、活用事例の紹介動画】
【組み立て動画】
技術的小話(ブログ記事)
弊社技術スタッフが初心者から中級者向けに本製品の利用に関して解説をしております。
製品活用の検討用にご覧いただければと思います。
製品の拡張例
ビュートローバーH8/ARM及びVS-WRC003LV、VS-WRC103LVを用いた拡張例です。
下記の作例に関しましてはサポート対応しておりません。また、プログラムのソースなども公開しておりません。
ライントレースクローラー
タミヤのリモコンロボット製作セット(クローラータイプ)に、VS-WRC003LV、VS-WRC103LVとビュートローバー用赤外線センサー取り付けた、ラインを検出しながら動作する自律ロボットです。
VS-WRC004LVを取り付け、3つ目のアーム用モーターを駆動しています。
アームに赤外線センサーを取り付けることで、ボールをつかんでいるかを検出することもできます。
2輪倒立振子ロボット
エンコーダ拡張セットと、秋月電子通商で販売されているジャイロセンサー組み合わせた倒立振子ロボットです。平行に取り付けられた2輪で倒立することができます。ギアボックスは一番高速なAタイプで組み立てています。
※他社製のアナログ出力タイプのセンサーを取り付ける場合、ビュートシリーズ用 アナログ入力デバイス用コネクターケーブルをご使用ください。また、必要に応じて、プルアップ抵抗のパターンカットを行ってください。
自律型サッカーロボット(全方位移動)
ダイセン工業製のロボサイトギヤモーターとオムニホイールを用いた、全方向に移動可能なサッカーロボットです。センサーで赤外線ボールを見つけ、シュートします。
全方位移動には4つのモーターを使用しますので、VS-WRC004LVを搭載し、DCモーター出力を増設しています。
VS-WRC103LV/VS-WRC003LVには、カラーファインダーや地磁気センサーも接続できます。(別途ケーブル作成が必要)
※ダイセン工業製のギアドモーターを駆動させる際は、ニッケル水素充電池3本(1.2v×3)で動作させてください。
※他社製のアナログ出力タイプのセンサーを取り付ける場合、ビュートシリーズ用 アナログ入力デバイス用コネクターケーブルをご使用ください。
また、必要に応じて、プルアップ抵抗のパターンカットを行ってください。
無線操縦サッカーロボット
ELEKITのスピンシューターにVS-WRC003LV、VS-WRC103LVを取り付け、無線で操縦できるように拡張しました。
VS-WRC004LVを取り付け、3つ目のシュート用のモーターを駆動しています。
自律移動台車
荷物を運ぶ台車の裏に、540タイプモーターとそれを駆動するための大出力モーターアンプVS-WRC006を取り付けた、台車型ロボットです。
8連赤外線センサーVS-IX010を使いライントレースをすることも可能です。
よくあるご質問(FAQ)
- ビュートローバーを接続しても認識しなかったり、通信エラーが発生したりします
-
- 基板上またはPCのUSBコネクターの損耗の可能性があります。PCの他のUSBポートなどをお試しください。
- USBケーブルの経年劣化により、半断線やコネクターの損耗が発生している場合、接続が不安定になります。異なるケーブルをお試しください。
- 外付けのUSBハブをご使用の場合、電力不足により正常に接続できないことがあります。PC本体のUSBポートをお使いください。
- ビュートローバーに接続されている周辺機器の影響により接続が不安定になることがあります。拡張基板などを一度外していただき、接続をお確かめください。
- ライントレースを行なうことが出来ません
-
- 赤外線センサーが、白地と黒いラインを計測できているか値を確認してください。この時、パソコンとロボットをUSBで接続したまま行ってください。閾値の設定は、BeautoBuilder2のセンサーエリア(画面の左下)を見ながら行ってください。
※プリンターの種類によっては、印刷したラインがうまく検出できない場合があります。プリンターを変えるか、黒のマジックペンやビニールテープを使用してください。センサー値を読み取り、白地と黒いライン上で数値が変われば、うまく読み取りができています。
- 太陽光や白熱灯など赤外線を含む光が当たっている場合、赤外線センサーがうまく白・黒を識別することが出来ません。室内で蛍光灯のもとライントレースを行うようにしてください。
- 「時間を決める」の設定で動かしてると、ラインを通り過ぎてしまう可能性があります。「続ける」の設定で動かしてみてください。ロボットを走らせるためのブロックを「まえにすすむ」などの動かすブロックをクリックすると、画面の左に「続ける」の部分のラジオボタンが表示されます。
詳しくは、こちらのファイルをダウンロードしてください。
- スピードを速くしたいです
- 「設定」→「モーターの設定」→「スピードちょうせい」より「はやさ」の数値をあげてください。ただし、スピードを上げすぎると、カーブや直角で曲がり切れなくなりますので、スピードを上げるときは、必ず少しずつ数値を上げて、その度にコースを走行させ確認してください。また、電池の残量によってもスピードが変わります。
詳しくは、こちらのファイルをダウンロードしてください。
- ロボットがうまく動作しません
-
- バッテリーの残量が減ってしまうとモーターの動きやセンサーの値が変わってしまうことがあります。
- ギヤボックス内の六角ナットのイモネジが緩んでいると正しく動作しません。ギヤに少しグリスを付けるとスムーズに走行することができます。
- 赤外線センサーの素子がずれていたり、左右でずれていると正しくセンサーの値を読み込むことができません。確認してください。
詳しくは、こちらのファイルをダウンロードしてください。
- C言語でプログラミングしたら通信が出来なくなりました
- ファームウェアをビュートビルダー2用のものに書き換えてください。H8版とARM版で書き換え方法が異なりますので、取扱説明書を確認してください。ファームウェアは、ビュートビルダー2のファームウェアフォルダー内にあります。
- プログラムを書き込むときに、「シーケンスのサイズが大きすぎます。書き込みを中断します。」と表示されます
-
- 作成したプログラムをロボットに書き込む際に、変換されたシーケンスデータのサイズが大きすぎて書き込めません。プログラムの命令を減らしてサイズを小さくしてください。
- 古いBeautoBuilder2及びファームウェアをご利用の場合は、それぞれ最新の物に差し替えていただくと、プログラムの書き込み領域サイズが増えて大きなプログラムも書き込めるようになります。最新のBeautoBuilder2とファームウェアは、ダウンロードページにて公開しています。
- エンコーダ拡張セットを付けるとどのような効果がありますか?
- エンコーダ拡張セットは、モーターの回転速度、回転した回数を取得できます。
ビュートビルダーから設定を有効にすることで、自動的にモーターの回転速度を一定に保たせることが出来きるので、ロボットの重さや電池の電力などに関わらずモーターの動きを安定させることが出来ます。
例えば坂道を上る場合、エンコーダを付けない状態だとスピードが落ちますが、エンコーダを付けることでスピードが落ちないようにロボットが自動的にモーターの回転速度を調整します。
また、タイヤがどれだけ回ったかを取得することできるので、すすんだ距離の測定や、決まった角度をまわることが可能になります。
- エンコーダーのフィードバックを有効にしたら挙動がおかしくなりました
- 拡張セットを付けていない状態で設定を有効にすると、ロボットが意図しない挙動を取る可能性があります。別売の「エンコーダ拡張セット」を付けることで、エンコーダーを利用することができます。
詳しくは、こちらのファイルをダウンロードしてください。
- IXBUSやエンコーダを有効にするにはどうしたらよいですか?
- ビュートビルダー2でエンコーダ・IXBUSを有効にする場合は、次の手順で行います。
まず、メニューより「設定」→「上級者向け機能の設定」をクリックし、開いたダイアログより「速度や旋回量を変更できる車輪制御ブロックを使う」の項目をチェックしてください。
次に、メニューより「設定」→「エンコーダ・IXBUS・Bluetoothの設定」をクリックし、開いたダイアログより、左下にある各項目にチェックを入れます。
IXBUSの数値をメモリマップから読み込む場合は「IXBUSの数値をメモリマップに反映させる」、エンコーダをメモリマップから読み込む場合は「エンコーダのスピードをメモリマップに反映させる」、モータにエンコーダをフィードバックさせる場合は「エンコーダのフィードバックを有効にする」を、ぞれぞれチェックします。
- シリアル通信で接続した後、USBからの接続ができなくなりました
- Release7以前のビュートビルダー2をお使いの場合、一度シリアル通信で接続した後、ビュートローバーH8(VS-WRC003LV)とHIDで接続できないバグがあります。
ダウンロードページより、最新のビュートビルダー2をインストールし直してください。
- 本製品の回路図は入手できますか?
- ビュートローバーH8(VS-WRC003LV)は「VS-WRC003LVダウンロードページ」で、ビュートローバーARM(VS-WRC103LV)は「VS-WRC103LVダウンロードページ」で、それぞれ公開しております。
- 標準のモーター以上の出力を持つ強力なモーターを接続することは可能ですか?
- 本体に標準で含まれるFA-130タイプのモーターよりも大きいモータをCPUボードに接続すると、モータードライバのICが電流に耐え切れずに故障する場合があります。そのため、出力の大きいモーターを使う場合は、別売の「大出力モーターアンプボード VS-WRC006 Ver.3」を必ずご利用ください。
なお、BeautoChaser用のモーターアンプボード「VS-WRC005」は、ビュートローバーH8/ARM共に接続することは出来ませんのでご了承ください。
- モーター出力ポート、アナログ入力ポートに接続するためのコネクターは、どこで入手できますか?
- ケーブルを圧着済みのコネクタを、弊社より販売しております。オプション・製品情報のページをご参照ください。
- Bluetooth(VS-C2)や無線リモコンで、通信のペアリングは確認できていますが、本体を操縦できません
-
- これらで操縦する場合、ロボット本体にビュートビルダー2からゲームパッドに対応したプログラムを書き込む必要があります。ゲームパッド操作用のサンプルプログラムとして、ビュートビルダー2には「ゲームパッドサンプル.bb2」というプログラムが収録されています。
- ビュートビルダー2からゲームパッド用の命令を書き込んでいても操縦できない場合、ロボット本体のプログラムをスタートしていない可能性があります。ビュートビルダー2のプログラムはロボット本体のCPUボードのボタンを押して開始する必要があります。
- Bluetoothから本体を制御する場合、ビュートビルダー2の設定>エンコーダ・IXBUS・Bluetoothの設定を開き、「Bluetooth(SPP)で通信する」にチェックを入れる必要があります。また、お使いのBluetoothデバイスの取扱説明書等を参照いただきポート番号を適切に設定してください。
- Bluetoothを有効にし、プログラムを書き込み、ロボット本体からスタートさせても操縦できない場合、本体の電池不足が考えられます。これらの拡張デバイスを追加することで消費電力が増え、ロボットの駆動時に電力が不足してリセットがかかるようになった可能性があります。新品のアルカリ乾電池、または満充電の単三型ニッケル水素充電池などでお試しください。
- 統合開発環境「HEW」をPCにインストールできません
- 「VS-WRC003LVダウンロードページ」より、インストール方法が掲載された資料をご参照ください。
- サンプルソースをHEWでビルドできません
-
- 「VS-WRC003LVダウンロードページ」より、「サンプルソースビルド方法説明資料」をご参照ください
- Windows Vista及びWindows 7をお使いの場合は、HEWを「C:Program Files」のフォルダにインストールしていると、設定の変更が反映されない場合があります。お手数ですが、一度HEWをアンインストールして、「C:Program Files」以外のフォルダにインストールしなおしてください。また、管理者権限でログインできる場合、HEWのインストールフォルダをフルコントロール可能にすることで、設定の変更を反映させることができるようになります。
- HEWで作成したプログラムをロボットに書き込む場合はどうすれば良いですか?
- 「VS-WRC003LVダウンロードページ」より、書き込み用ソフトウェア「H8 writer」をダウンロードしてお使いください。ビュートローバーH8はPCからシリアルポートとして認識されないため、プログラムのデータをFDTを使って書き込むことはできません。