���C�X�g���������
01�C���z�C�[�����[�^�[�̗p�A�啝�ȐÉ������������� ���K���[�o�[Ver.3.0
4571398313905.jpg)
���K���[�o�[Ver.3.0�́A���А������J���p��ԃ��{�b�g�̒��j���f���ł���u���K���[�o�[Ver2.1�v�̌�p�@�ł��B���d�ʖ�40kg�̑�^➑́A�lj��H��J�X�^�}�C�Y���s���₷���A���~�j�E����➑́A�\�t�g�E�F�A�J����e�ՂȂ��̂Ƃ���Arduino IDE�Ή��A�_��ō��x�Ȑ������������ROS1�Ή��Ƃ������������̓��������̂܂܌p�����A����ɁA�쓮�ւɃ_�C���N�g�h���C�u�^�C�v�̃C���z�C�[�����[�^�[���̗p���邱�Ƃɂ��A�����̃��f���Ɣ�r���Ė�20dB�̑啝�ȐÉ������������܂����B����ɂ��A�l�X�Ȏ����^���E���������V�[���ŋ��߂��Ă��鍂�x�ȋ@�\��ϋv�����\���ɖ������A�����F���Ȃǂ��悤�ȍ����Ïl�������߂���p�r�ɂ��K�������i�ƂȂ��Ă��܂��B
�{���i�̊J���ɂ����ẮA���C�X�g��������Ђɂ�����R�~���j�P�[�V�������{�b�g��e��̃G�[�W�F���g�V�X�e���̊J���o�����t�B�[�h�o�b�N���A�d�l������s���Ă���܂��B���K���[�o�[Ver.3.0�́A�P���ȕ����E�^���̎�������I�[�g���[�V�������ɂƂǂ܂炸�A����炳��Ɉ���i�߂��A��胆�[�U�[�t�����h���[�ŃC���e���W�F���g�ȃV�X�e�����\�z���邱�Ƃɍv�����܂��B
ROS�ɂ�鐧��ɑΉ�
���K���[�o�[Ver.3.0��ROS 1�����ROS 2���b�Z�[�W�ʐM�ɑΉ����Ă���AROS�����삷��f�o�C�X��Wi-Fi�܂���USB�P�[�u���Őڑ����邱�ƂŁArosserial��������micro-ROS��p����ROS�̃��b�Z�[�W�ʐM���\�ł��B
�T���v���t�@�[���E�F�A�ł́Ageometry_msgs/Twist�^��������geometry_msgs/msg/Twist�^���g���āAROS�����ԃ��{�b�g�ɑ��Ĉړ����x�w�ߒl�𑗐M������A��ԃ��{�b�g���猻�ݑ��x��o�b�e���[�d�����擾�����肷�邱�Ƃ��\�ł��B�܂��A���[�U�[�̎�ɂ���ăt�@�[���E�F�A��ύX���邱�ƂŁA��L�̑��ɂ��C�ӂ̃��b�Z�[�W�𑗎�M���邱�Ƃ��\�ł��B
�Ȃ��AROS�삳����f�o�C�X�͕ʓr���p�ӂ��������K�v������܂��B���ЂŐ�������f�o�C�X�̓�����͎��̒ʂ�ł��i�{���i�Ɋ܂܂�Ȃ����C�u�����[�Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��j�B
���{���i�Ɋ܂܂�Ȃ����C�u�����[�Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B
ROS 2�g�p���̐�����
������J����ROS 2�Ή��t�@�[���E�F�A����уT���v���ނɂ��āA�����̎g�p���͈ȉ��̒ʂ�ł��B
�yROS 2�g�p���̐���������z
| OS | Ubuntu 22.04 |
| ROS | ROS 2 Humble |
| CPU | IntelR CoreTM Ultra 5 125H Processor |
| RAM | 32GB |
| �X�g���[�W | M.2 SSD 256GB |
| �O���t�B�b�N | IntelR ArcTM GPU |
����L���������Ă��Ă��A�����Ȃǂɂ��A����ɓ��삵�Ȃ��ꍇ������܂��B
�����z���́A�^�C�����O�ɂ����S�Ȑ��䂪�s���Ȃ��ꍇ������A�������Ă���܂���B
ROS 2�Ŏg�p�\�ȃT���v���p�b�P�[�W���
ROS 2���Ŏg�p�\�ȃT���v���p�b�P�[�W�́A��Ɉȉ��̂��̂���Ă��܂��B
�Ȃ��A�@�ނ̐ݒ�⓮����ɂ���ẮA�T���v�����Ӑ}�ʂ蓮�삵�Ȃ��ꍇ������܂��B���̏ꍇ�A�ʊ��ɍ��킹���ݒ�Ȃǂ��K�v�ł����A�p�����[�^�[�̒����̓��[�U�[�Ǝ��̊J���ɂ�����A���Ђ���̃T�|�[�g�̑ΏۊO�ł��B
�y��ȃT���v���p�b�P�[�W�ꗗ�z
- �L�[�{�[�h����̑���
- �}�E�X����̑���
- ���s���x�����I�h���g���ɕϊ�
- �ϊ������I�h���g�����@�̂̃��f���t�@�C���Ƌ���rviz2�ɕ\��
- SLAM�ɂ��n�}�쐬�iSLAM Toolbox�g�p�j
- SLAM�ɂ��n�}�쐬�igmapping�g�p�j
- �o�H�v��A�Ǐ]����я�Q��������s�������ړ��iNav2�g�p�j
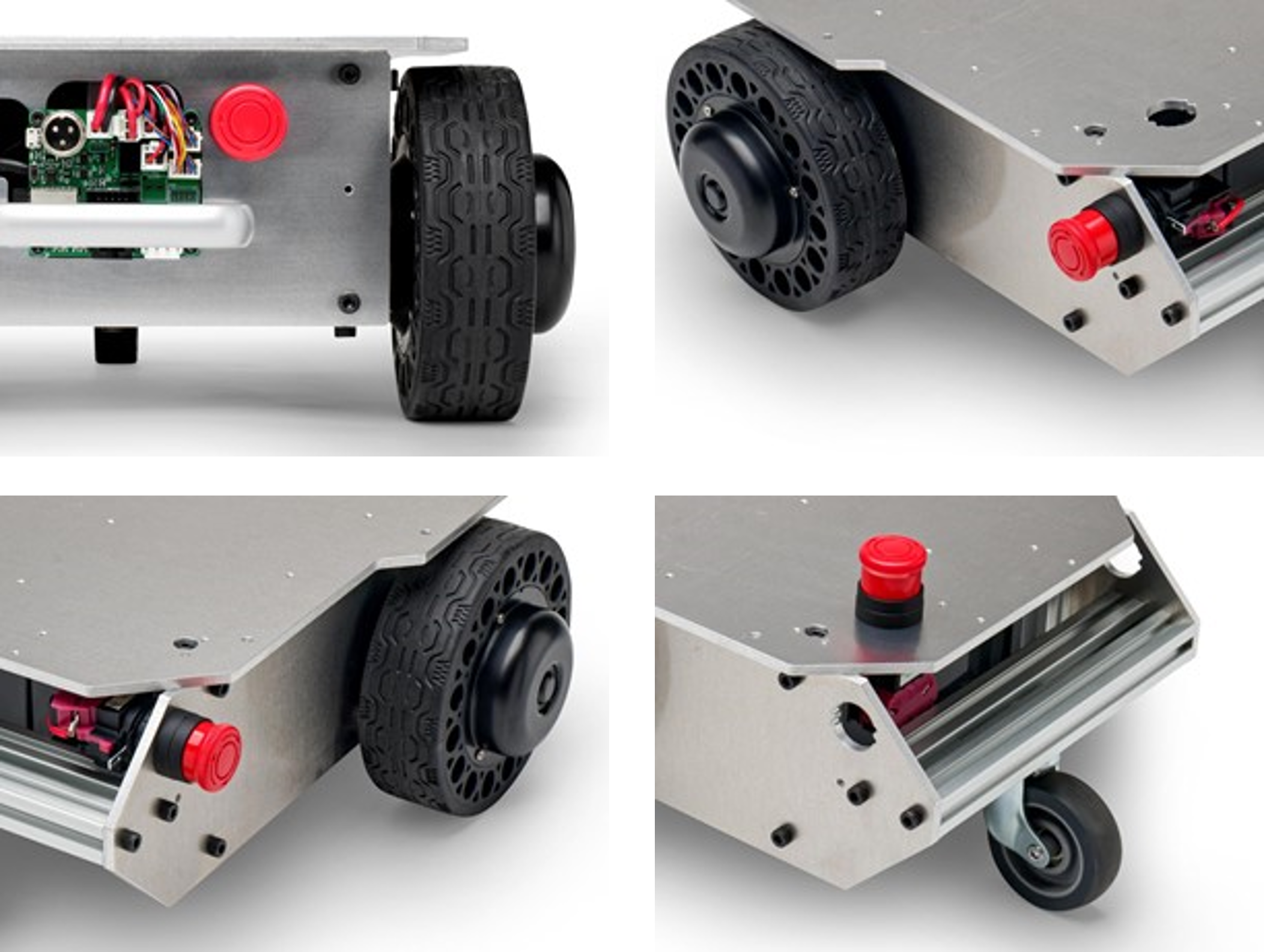
�C���z�C�[�����[�^�[���̗p�����É��\��
��^�̌����J���p��ԃ��{�b�g�ɂ����ẮA�����f���ł��郁�K���[�o�[Ver2.1�̓��쉹�ł����ʂȎx�Ⴊ����Ƃ������̂ł͂���܂���ł����B�������A��ԃ��{�b�g�ɓ��ڂ���@��ɂ����ĉ����F���≹�����b�����s����ۂȂǂɂ́A�\�Ȍ��肻�̓��쉹�����������Ƃ��]�܂�܂��B���̂��߁A�������郁�K���[�o�[Ver.3.0�ɂ����ẮA�쓮�ւɐV���ɃC���z�C�[�����[�^�[���̗p���܂����B����ɂ��A���K���[�o�[Ver2.1�Ɣ�r���A���Ў����l�ɂĖ�20dB�i����ɂ����āj�̓��쉹�ጸ���ʂ������Ă��܂��B
���ۂ̒�����̓��쉹�ɂ��ẮA���삳�������H�ʏA�ύڏA����v���O�����ɂ��傫���قȂ�܂����A���Ђł̎Г����ɂ����ẮA�u���K���[�o�[Ver.3.0���߂Â��Ă��Ă��C�t���Ȃ��v�قǂ̐É�������������Ă��܂��B
�������铮������ɂ����ď�L�Ɠ������ʂ���������̂ł͂���܂���B
���d�ʖ�40�s������������쓮��ԃ��{�b�g
�{���i�́A�ʏ�^�C�v�̓�쓮�ւƈ�ւ̃L���X�^�[�����ڂ��ꂽ�O�֍\���ƂȂ��Ă��܂��B�ʏ�ԗւ��̗p�������Ƃɂ��A�����I�Ȑ���̂��₷���⓮�쎞�̐Ïl�����m�ۂ���Ă���A���p���x���܂ł�����������̓I�Ȍ����E�J�����\�ł��B
���d�ʂ͋����f���ƕς�炸��40�s���������Ă���A�ō����x�͎�����1.6m/s��B�����Ă��܂��B��^�̎��������ԂȂ�ł͂́A���p�I�ȉ^���p�r��z�肵�������E�J�������{�ł��܂��B
���{���i�͏�p���Ӑ}���Đv���ꂽ���̂ł͂���܂���B
�L�� / �����ڑ��ɂ�鐧�䂪�\
���K���[�o�[Ver.3.0�́AWi-Fi�ɂ�閳���ʐM�ƗL����USB�V���A���ʐM�ɑΉ����Ă��܂��B�w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���琧�䂷�邱�Ƃ��\�ł��B
�܂��A�Q�[���p�b�h�^�����R���g���[���[���t�����邽�߁APC����ڑ����Ȃ��Ă��{�̂����c���邱�Ƃ��ł��܂��B�A�i���O�X�e�B�b�N���g�p���āA�O��ֈړ��A��]�����邱�Ƃ��ł��A����m�F�̂��߂̎蓮���c�A��펞�̑����i���Ƃ��Ă��g�����������܂��B
Arduino IDE�Ńv���O�����\
�{���i�ɓ��ڂ���Ă��鐧��{�[�h�uVS-WRC058�v�ɂ́AESP32-WROOM-32�}�C�R�������ڂ���Ă���AArduino IDE��p���Đ���v���O�������쐬���邱�Ƃ��ł��܂��B�T���v���R�[�h��Arduino���C�u�����[�̌`�Ő��i�ɕt��������܂��̂ŁA���[�U�[���g�̎�Ńt�@�[���E�F�A�̃J�X�^�}�C�Y�����{���邱�Ƃ��\�ł��B
��VS-WRC058��Arduino IDE��p���ăv���O���~���O����ꍇ�AArduino IDE 1.8.13�ȏオ���삷������K�v�ł��B
�g�����₷���A���~�t���[�����̗p
�{���i�̖{�̃t���[���̓A���~���ނɂč\������Ă��܂��B�\���ȋ��x�����Ɠ����ɉ��H���e�ՂȂ̂ŁA���[�U�[���g�̎�ŁA�l�X�Ȋg����e�Ղɍs�����Ƃ��ł��܂��B�㕔�V�Ɏ��t�������J���ĕ��i��lj����邱�Ɠ����\�ŁA�����E�J���̐��i�Ɍ������Ȃ����R�Ȋg�����������炵�܂��B
����~�X�C�b�`��W�����ڂ��A���t���ʒu���ύX�\
�{���i�ɂ́A�]���̃��f���ŕʔ��I�v�V�����ł������u����~�X�C�b�`�v��W�����ڂ��Ă��܂��B�܂��A����~�X�C�b�`�̎��t���������炩���ߕ������ڂ��Ă���A�w����Ƀ��[�U�[�̎茳�Ŕ���~�X�C�b�`�̎��t���ʒu���ȒP�ɕύX���邱�Ƃ��ł��܂��B���ۂɎg����p�r�ɉ������œK�Ȉʒu�ɔ���~�X�C�b�`��݂��邱�Ƃ��ł��A�^�p���̈��S��������ł��܂��B
����~�X�C�b�`��W�����ڂ��A���t���ʒu���ύX�\
���ʂȃI�v�V�����i�ɑΉ�
���K���[�o�[Ver.3.0�́A�����i�Ɠ��l�ɐ������̃I�v�V�����i�ɑΉ����Ă��܂��B�p�r�ɍ��킹���Z���T�[��\�����i��lj����邱�Ƃ��\�ŁA���l�Ȍ����E�J������ɂāA��^�̌����J���p��ԃ��{�b�g�̉�����s�\�͂𑶕��Ɋ��p���邱�Ƃ��ł��܂��B
4571398313905_9.jpg)
�g���@�퓋�ڗ�1
4571398313905_8.jpg)
�g���@�퓋�ڗ�2
02���i�d�l
| ���i�� (�^��) |
���K���[�o�[Ver.3.0 |
|---|---|
| �T�C�Y | W357�~D359.5�~H150(mm) |
| �{�̏d�� | ��14.2kg |
| �ō����x�i�����l�j | 1.6m/s |
| �ύڏd�� | ��40kg |
| �{�̍ގ� | �A���~�j�E�� |
| �o�b�e���[ | 24V�V�[�����o�b�e���[ 288Wh |
| �쓮���� | ��쓮�A�㕔�L���X�^�[�~1 |
| �^�C�����a | 140mm |
| ���[�^�[ | BLDC���[�^�[ 40W�~2 |
| ������ | VS-WRC058 |
| ROS�Ή� | ROS 1�����ROS 2�ɑΉ� |
| SDK | VS-WRC058�p Arduino���C�u�����[�AROS�p�b�P�[�W |
| ���^�T���v��
���{���i�Ɋ܂܂�Ȃ����C�u�����[�Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂� |
Arduino���C�u�����[ �ԗ��� �^ �e��ʐM�@�\�� ROS�p�T���v���R�[�h �Q�[���p�b�h����̑��� �}�E�X�i�^�b�`�p�b�h�j����̑��� SLAM�igmapping�j navigation |
| �C���^�[�t�F�[�X | USB�V���A���AWi-Fi�iIEEE802.11b/11g/11n�j |
| �t���i | �[�d��A�������c�p�Q�[���p�b�h�^�R���g���[���[ |
| ���w���͂����� | ���K���[�o�[Ver.3.0 |
���{���i�͉�����p�ł��B���O�ł̎g�p�͑z�肵�Ă���܂���B
�܂��A���i�̎d�l�͗\���Ȃ��ύX�ƂȂ�ꍇ������܂��B
03�n�[�h�E�F�A�\��
���K���[�o�[Ver.3.0
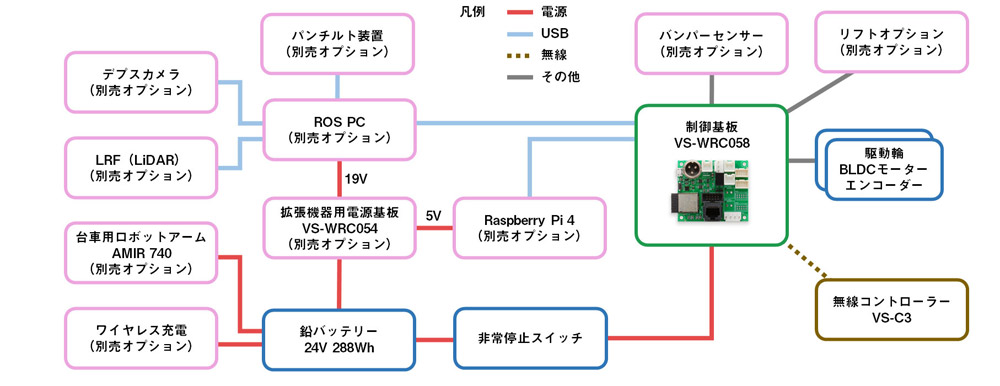
��VS-WRC058�ɂ́A�����̃z�X�g�Ɠ����ɒʐM����@�\�͂���܂���B
��LRF�iLiDAR�j�ƃf�v�X�J�����́ARaspberry Pi 4�ɐڑ����邱�Ƃ��\�ł��B
Ubuntu�́ACanonical Ltd.�̏��W�܂��͓o�^���W�ł��B
Arduino�́AArduino AG�̓o�^���W�ł��B
Wi-Fi�́AWi-Fi Alliance�̓o�^���W�ł��B
BluetoothR�́ABluetooth SIG, Inc. USA�̏��W�܂��͓o�^���W�ł��B
Intel�A�C���e���́A�A�����J���O������� / �܂��͂��̑��̍��ɂ����� Intel Corporation �܂��͂��̎q��Ђ̏��W�ł��B
Raspberry Pi��Raspberry Pi���c�̏��W�܂��͓o�^���W�ł��B
���̑��A�L�ڂ���Ă��鐻�i���Ȃǂ̌ŗL�����́A��ʂɊe�Ђ̏��W�܂��͓o�^���W�ł��B
