ヴイストン株式会社
オプション一覧
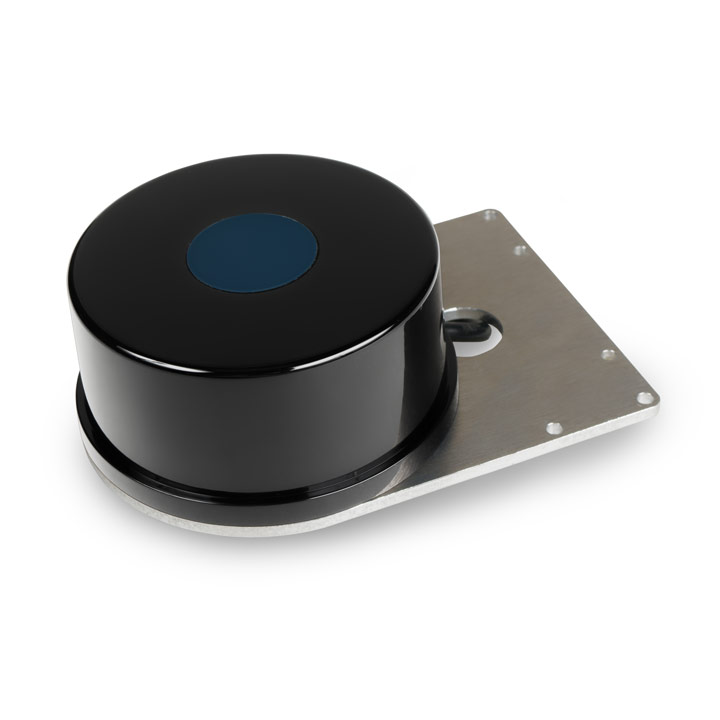
01LRFオプション(TG30)
ROS対応台車ロボット専用のLRF(レーザーレンジファインダ)オプションです。機体周囲の障害物等を検知できる様になり、SLAMやnavigationも行なえるようになります。
台車本体の前・後に各1個ずつを取り付けることができます。
なお、LRFを使用するためにはROS PCオプション等、LRFの信号を処理できるデバイスを別途搭載する必要がございます。ローバー本体にはLRFを接続する機能はありません。
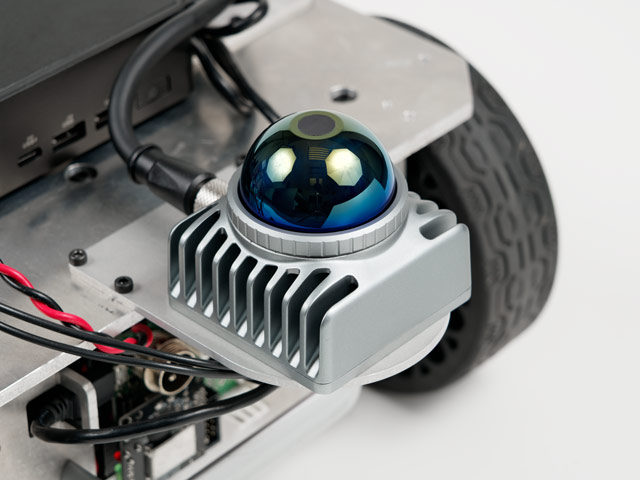
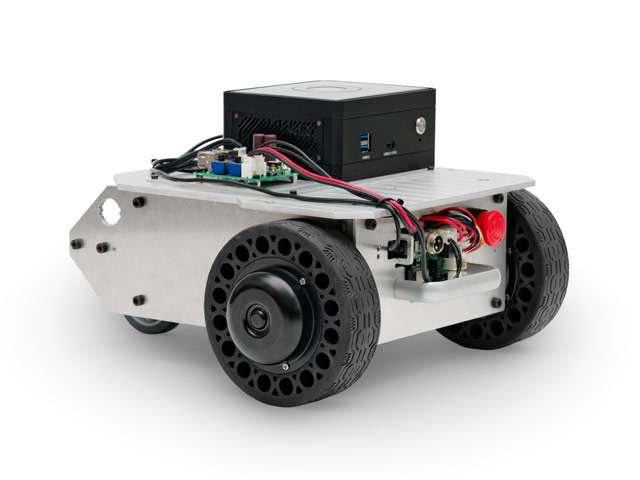
023D LiDARオプション
平面に加えて高さ方向の測距が可能な3次元LiDARを研究開発用台車ロボットに搭載する専用オプションです。
2DタイプのLiDARでは把握が難しい周囲状況にも対応が可能となり、複雑化・多様化する自動搬送や自律移動の研究・開発を強力に支援します。

小型・高性能なLivox Mid-360を採用
本オプションにおいては、Livox社製の小型・高性能3D LiDARである「Livox Mid-360」を採用しました。測距のためのレーザーは周囲360度、上下59度(-7度〜+52度)を走査可能で、検出可能距離はおおよそ40〜70mです(実際の検出可能距離は、検出対象物により大きく異なります)。
ヴイストン株式会社製の研究開発用台車ロボットシリーズにおいては、これまでも2Dタイプの「LRFオプション(TG30)」などをラインナップしていましたが、本オプションにおいては、2次元タイプのLiDARでは検出が困難な「高さ5cm程度の障害物」や「脚の細い椅子」などを検出できることが期待できます。そのため、2D LiDARでは走行が困難であった環境においても、本オプションを用いることでSLAMや自律走行が可能となる場合があります。
一方、2D LiDARは3D LiDARと比較して、検出した値の処理が低負荷であるという特徴があり、2Dタイプ・3DタイプいずれのLiDARを用いるかは、用途・環境・リソースなどの状況により適切に選択していただく必要があります。
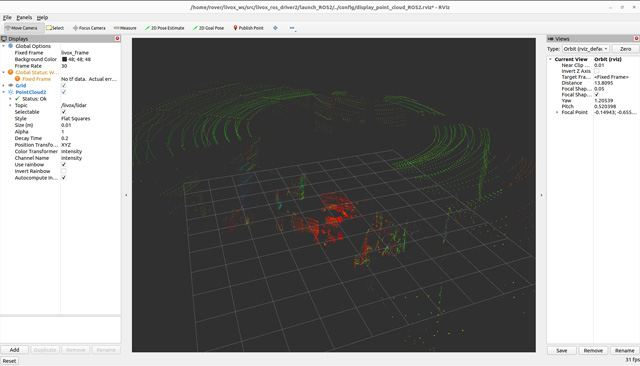
ROS PC(NUC14)オプションで動作確認済み
3D LiDARオプションにおいては、ROS 2 Humbleをセットアップした「ROS PC(NUC14)オプション」で動作を確認済みです。台車ロボット本体に対して、本オプションに加え、「ROS PC(NUC14)オプション」と「拡張機器用電源基板 VS-WRC054」をあわせてご注文いただくことで、3D LiDARを用いた開発を迅速に始めることができます。
なお、「ROS PC(NUC14)オプション」には、3D LiDARオプション用のセンサードライバーパッケージのみがセットアップ済みです。3次元SLAMのサンプルプログラム等は付属せず、ユーザーにて開発や実装をいただく必要があります。
03バンパーオプション
ROS対応台車ロボット専用のバンパーオプションです。壁等との衝突を検知できる様になります。車体の前後に取付けた状態で出荷いたします。
標準のスケッチ(ファームウェア)では、バンパーが押下されている間ホイールがフリー回転になります。また、バンパーの押下状態はROSメッセージとして配信されます。お客様にてスケッチを変更いただくことで、任意の機能を実装いただくことも可能です。
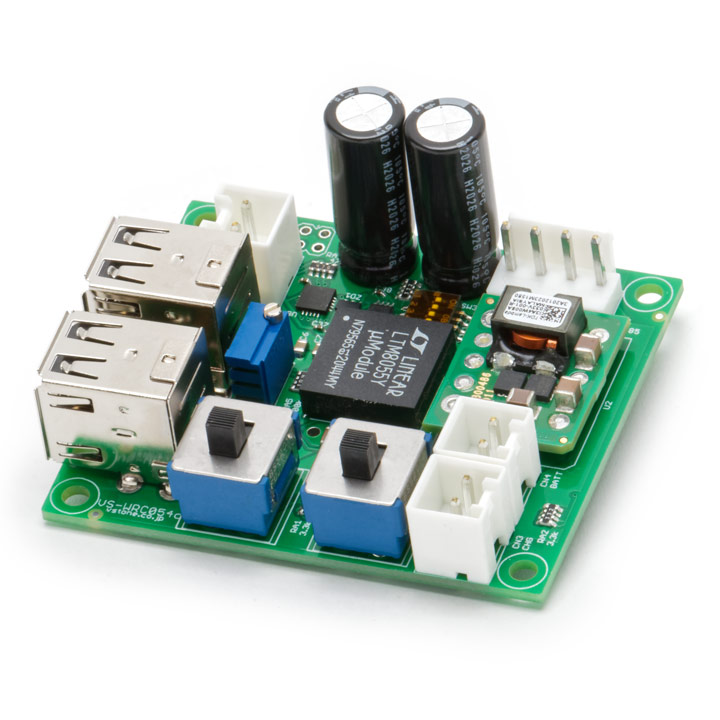
04拡張機器用電源基板 VS-WRC054
ROS PCオプションやRaspberry Pi 4Bなどの拡張機器を搭載した際に、それらの機器に対して研究開発用台車ロボット本体のバッテリーから電源を供給します。
本体の大容量バッテリーから電源を供給することで、拡張機器用の電源を別途搭載する必要が無くなり、ロボットの構成をシンプルにすることができます。
※弊社から販売しておりますオプション機器以外への電源供給については、動作保証対象外となります。
【入出力仕様】
| 入力電圧 | 10-30V | |
|---|---|---|
| 5V出力 | 出力電圧 | 5V |
| 最大出力電流 | 8A ※USB Type-A, Raspberry Pi GPIO 互換スルーホール合計 |
|
| 出力コネクタ | USB Type-A ×4 口, Raspberry Pi GPIO 互換スルーホール ※Raspberry Pi GPIO 互換スルーホールの機能は電源供給のみ |
|
| 可変電圧出力 | 出力電圧 | 13.2-36V ※半固定抵抗で調整可能 |
| 最大出力電流 | 4A(19V 時) | |
| 出力コネクタ | B2P-VH-FB-B(LF)(SN) (基板側) | |
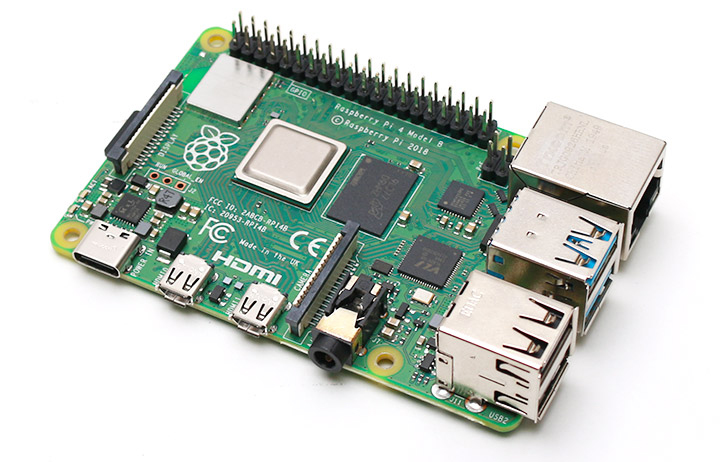
05Raspberry Pi 4B 4GB版 オプション
VS-WRC058との接続用USBケーブルが付属する他、Raspberry Pi 4との接続の為のはんだ付け等全て行なった状態で出荷いたします。
SDカードおよび OS イメージは付属しませんので、お客様にてご用意ください。
※弊社が公開しております各台車のROSサンプルは、Raspberry Piでの動作確認を行っておりません。
06ROS対応台車ロボット用セットアップ済みPCオプション
ROS PC(NUC14)オプション
本製品は、各種研究開発用大型台車ロボットのオプション品で、対応ロボットをROSで制御するためのPCと取り付け金具から構成されています。
搭載されるPCには、対応ロボットをROSで制御する際に必要となる環境(Ubuntu OS、ROS、および必要パッケージ)があらかじめ構築されており、対応ロボットに本製品を搭載、接続するだけで導入が完了します。
PCの電源は別売の専用基板を介してロボットのバッテリーから供給されるため、外部電源は不要です。
UbuntuやROSを初めて使う方でも、PCのセットアップ作業を省略し、サンプルプログラムでの動作を確認することができます。
.jpg)
対応ロボットに搭載・接続するだけでROSによる制御が可能に
ヴイストン株式会社製の研究開発用大型台車ロボットをROSで制御するためには、UbuntuおよびROS環境を構築する必要があります。しかしLinuxやROSを初めて触る方にとっては、CUIが中心となるセットアップ作業は難しく、正しい環境構築が行われなかった場合ロボットは正常に動作しません。また、選択したPCとUbuntuやロボットとの相性が悪かった場合は、インストールや接続そのものがまったく成功しないこともあります。ROS PCオプション(NUC14)は、研究開発用台車ロボットで動作確認済みのPCに、必要な環境やサンプルプログラムをあらかじめセットアップしてあるため、簡単な接続操作のみでROSを使った制御に着手できます。
ASUS製のNUC14RVKI5を採用
搭載するPCにはASUSブランドのベアボーンPCを採用しています。 小さな筐体により、研究開発用大型台車ロボットのカスタマイズ性を損なうことなく搭載することが可能です。 また、対応ロボットに付属する各サンプルを動作させるのに十分なスペックを有しています。 スペックの詳細は下表をご覧ください。
Ubuntu OS および ROS環境をセットアップ済み
PCには、Ubuntu OSとROS環境とを導入済みです。また、研究開発用大型台車ロボットに付属している以下のサンプルプログラムがセットアップ済みとなっておりますので、面倒な環境構築は不要です。
【ROSサンプルプログラム一覧】
- ゲームパッドからの操作
- マウス(タッチパッド)からの操作
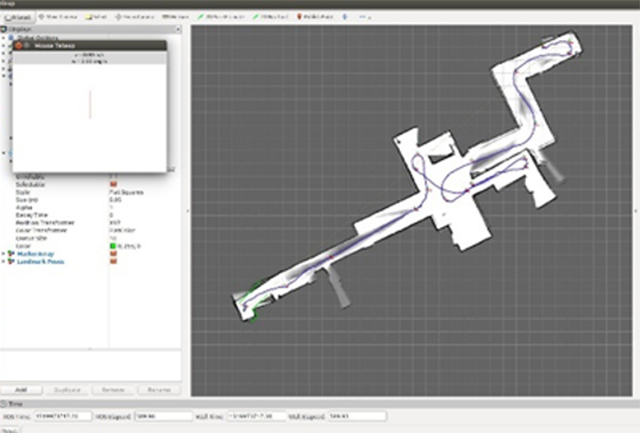
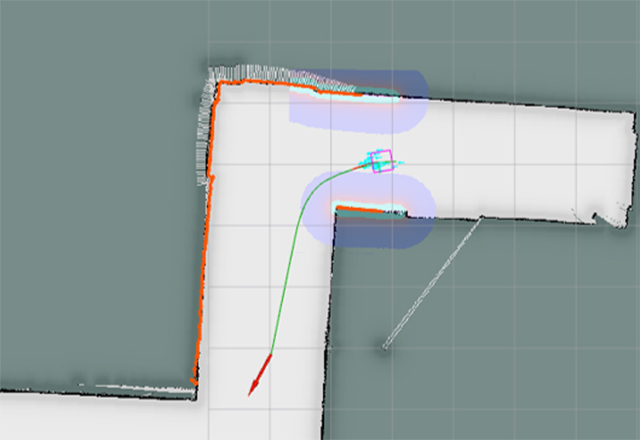
- SLAM(gmapping)
- navigation
※本製品に含まれないライブラリなどのセットアップが追加で必要になる場合があります。
※SLAM、navigationを行うためにはLRFが必要です。LRFオプションのご利用が便利です。
 |
 |
| SLAM サンプルによる地図作成 | 研究開発用台車ロボットVer.2.0シリーズ |
電源はロボットから供給され、コードレスで運用可能
ROS PCオプションは、別売の「拡張機器用電源基板 VS-WRC054」と組み合わせて使用します。 この電源基板は、対応ロボットのバッテリーからPCに電源を供給することができます。 PCのために外部から給電する必要がありませんので、PC搭載のロボットをコードレスで運用することができ、実験等をスムーズに行うことができます。
|
 |
| VS-WRC054 | Arduino IDE |
【搭載PCのスペック】
| ベアボーン | ASUS NUC14RVKI5 |
| OS | Ubuntu 22.04(64bit) |
| ROS | ROS 2 Humble |
| CPU | IntelR CoreTM Ultra 5 125H Processor |
| メモリ | 32GB |
| ストレージ | M.2 SSD 256GB |
| グラフィック | IntelR ArcTM GPU |
07GPU PCオプション
NVIDIAR Jetson OrinTM NXを搭載した強力な演算ユニット(PC)を取り付けることができるオプションです。
NVIDIAR Jetson プラットフォームに提供される強力なツール群が活用可能で、外部RGBカメラなどから取得した画像に対して、高度な演算・解析などを高速に実行するなど、従来よりもさらに進化したロボット制御を実現することができます。
【主な仕様】
| システム | 1NVIDIAR Jetson OrinTM NX 16GB Super |
|---|---|
| SDK | NVIDIAR JetPack 6.2 あるいはそれ以降 |
| CPU | 8-Core ArmR CortexR-A78AE v8.2 64-Bit CPU / 2MB L2 + 4MB L3 |
| GPU | 1024-Core NVIDIA Ampere Architecture GPU with 32 Tensor Cores |
| RAM | 16GB / 128-bit LPDDR5 / 102.4GB/s |
| ストレージ | M.2 2280 SSD 128GB |
| 映像出力 | HDMI 2.0(最大 4K 60fps) |
| ネットワーク | RJ45 イーサネット(10/100/1000Mbps)×2 |
| USB | USB 3.2 Gen2(Type-A)×2 / USB 3.2 Gen2(Type-C、OTG対応)×1 / USB2.0(Type-A)×2 |
| ROS | ROS 2 Humble |
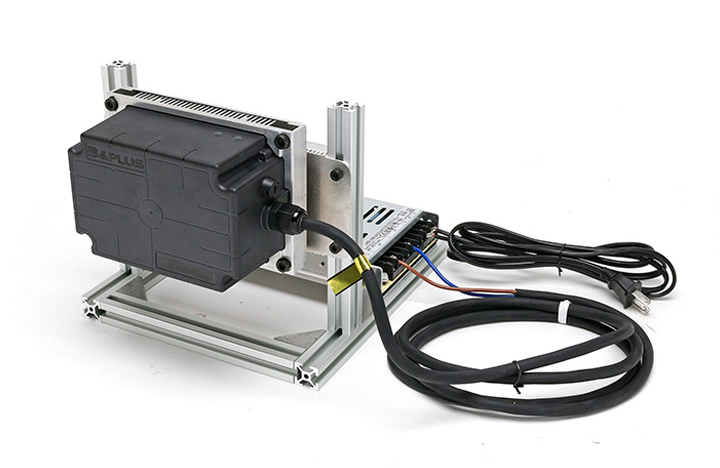
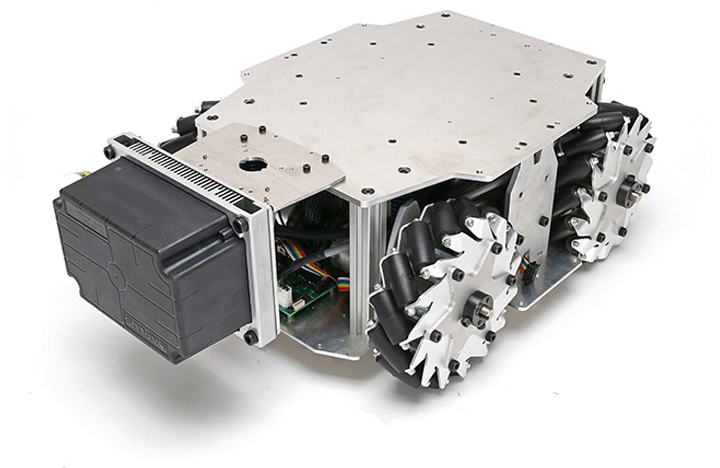
08ワイヤレス充電オプション
無線での給電機能を追加する、注文時有償オプションです。
本製品を用いることで、これまで充電器に接続して行っていたバッテリーへの充電を無線化することができ、運用の効率化を図ることができるほか、台車ロボットの自律動作プログラムの中に充電(充電器への帰還)を組み込むことによる可用性の向上、連続稼働時間の延長など、台車ロボットとしての活用の可能性そのものを大きく拡張することができます。
 |
 |
構成図
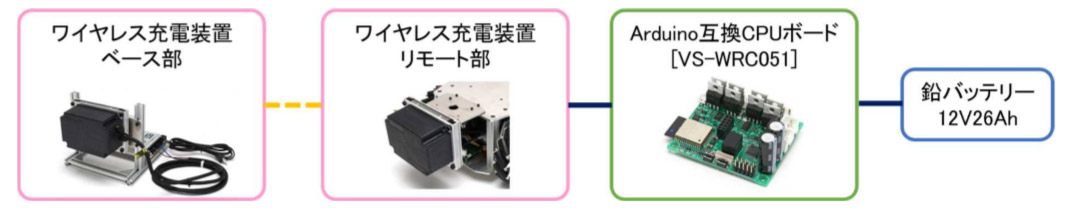
【本体仕様】
| 搭載機器 |
メガローバーVer2.1 メカナムローバーVer2.1 4WDSローバーVer2.1 |
メガローバーVer.3.0 メカナムローバーVer.3.0 4WDSローバーX40A メガローバーF120A メカナムローバーG120A 4WDSローバーX120A メガローバーVer.3.0 屋外対応版 メガローバーF120 メカナムローバーG120 |
|---|---|---|
| 充電電圧 (バッテリー電圧によって変動します) | 14.8V 以下 | 29.0V 以下 |
| 充電電流 (バッテリー電圧によって変動します) | 8.5A 以下 | 4.3A 以下 |
| 伝送距離 | 0〜10mm | |
| 許容ずれ | ±4mm | |
※高周波利用設備申請対象の製品のため、総務省に規定の書類を提出する必要があります。
※付属の参考資料に従いお客様にて申請作業を実施いただく必要があります。
09カメラステーオプション
別売のデプスカメラなどを固定できるカメラステーを取り付ける、本体注文時の有償オプションです。天板から265mmまでの任意の高さにカメラを固定でき、固定角度も調整可能です。理想的なカメラ位置・角度で運用が可能です。
10デプスカメラオプション
研究開発用台車ロボットに、深度情報を含んだフルカラーRGB画像が取得できるステレオカメラ(RGB-Dカメラ)を搭載する、台車ロボットご注文時の有償オプションです。デプスカメラオプションを用いることで、通常のRGB画像と合わせて深度情報が得られるため、自己位置推定やロボットによるマッピングを高速、高精度に実現可能です。
台車ロボットにおけるSLAMや自律制御については、LRFを用いたLiDARスキャン、深度情報を持たない通常のRGBカメラを用いたVSLAMなどがあり、弊社製研究開発用台車ロボットにおいても「LRFオプション」などで提供中です。今回発売するデプスカメラオプションは、それらに加えてRGB-Dカメラによる手法を追加するもので、活用する用途や環境に合わせた最適な選択が可能です。

深度情報を含むRGB画像が取得可能なカメラを搭載
デプスカメラオプションでは、カメラとしてIntelR RealSenseTMD435iを採用しました。RealSenseTMSDKを活用することで、プログラミング環境の構築と活用とをスムーズに進めることができます。RealSenseTMを活用した事例は一般にも数多く公開されているため、既存の情報を活用した効率的な開発・実装が可能です。デプスカメラオプションにより得られるRGB-D画像の活用には、適切な処理が行えるPC等が別途必要となります。弊社では、研究開発用台車ロボットの専用オプション「ROS PCオプション」にて動作確認を行っています。

オプション品のカメラステーを標準搭載
本オプションには、既発売の「カメラステーオプション」が標準で含まれます。台車ロボットの天板から265mmまでの任意の高さにカメラを固定でき、固定角度も調整可能です。理想的なカメラ位置・角度で運用が可能です。
11リモート制御オプション
 |
 |
| リモート制御オプション(搭載例) | HDMIディスプレイ、Web会議用スピーカーホン、 Webカメラが付属 |
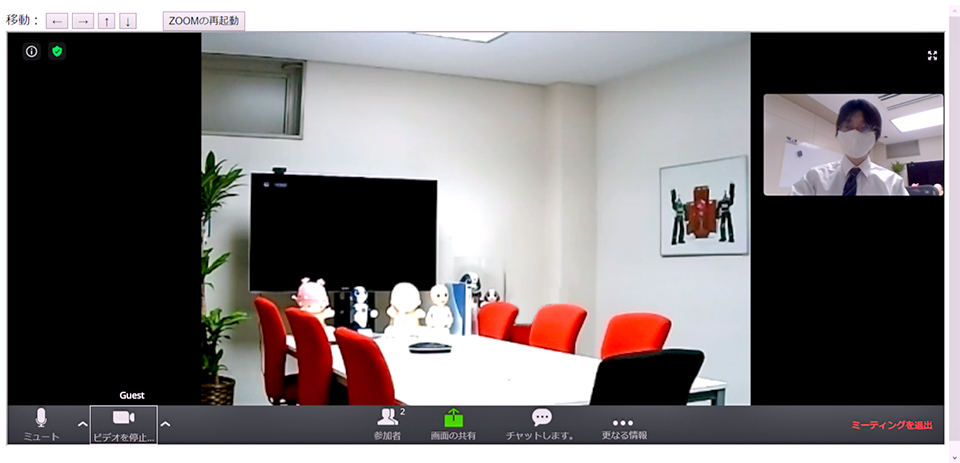
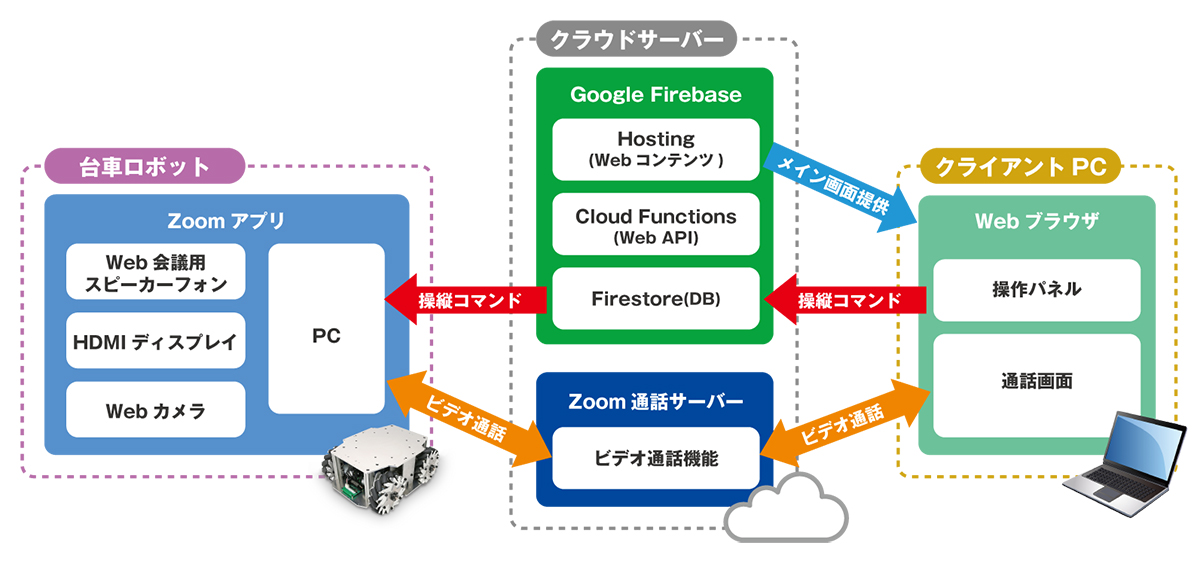
台車ロボットをテレイグジスタンスロボットとして活用可能
本オプションには、台車ロボットに搭載するためのディスプレイとWeb会議用スピーカーホン、Webカメラが含まれます。ディスプレイには通話元の映像が表示されるほか、会議用マイクを用いた自然な会話が行えます。通話元のZoom画面には、通話先である台車ロボットを操縦するための専用ボタンが表示されるため、このボタンを押下することで、通話先の台車ロボットをネットワーク越しに前後・左右移動させることが可能です。これらの特徴により、画面、音声、存在感が備わったテレイグジスタンスロボットとして利用できます。

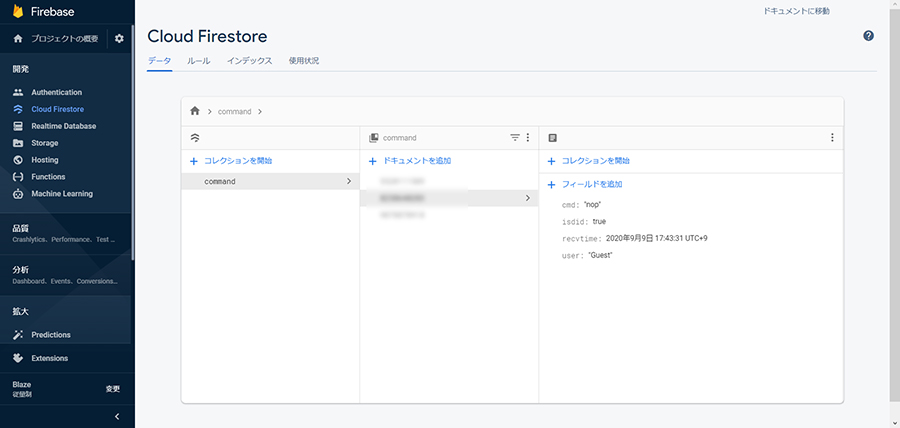
シンプルなサーバー構成で運用可能
本オプションでは、台車ロボットへの各種機器の搭載とプログラム導入のほか、クラウドサーバーでの準備も必要となります。用いるクラウドサービスは「Google Firebase」と「Zoom」の通話サーバー(SDKの導入)で、いずれも安価に利用開始、運用が可能です。
各種サーバーの構築についてはマニュアルを用意していますので、少ないリソースで環境構築が可能です。
※各社のサービス提供有無や提供価格などは、今後予告なく変更となる可能性があります。
セット内容
- HDMIディスプレイ、専用接続ケーブル(USB接続)
- Web会議用スピーカーホン
- Webカメラ
- 機材取り付け台(天板高さ:地上1100mm、天板寸法:W280×D280×H3 (mm))
- システムインストール用PC(ROS PCオプション)
- 拡張機器用電源基板 VS-WRC054
※システムインストール用PCについては、「ROS PCオプション」を同時ご購入の場合、両者を兼ねることが可能なほか、お客様でご用意いただいたPCに導入することも可能です。
※対応の動作環境であっても、相性等の問題から、あらゆるPCでの正常な動作を保証するものではありません。
※製品の機能や構成、仕様については、予告なく変更する場合があります。
導入手順
弊社からお客様へは、上記セット内容に沿った各種部品を搭載した研究開発用台車ロボットを納品します。本オプションは開発が必要なSDKであり、完動品ではありません。お客様には、弊社から提供する取扱説明書に従い、Zoomアカウントの準備、システムインストール用PCのセットアップ、Google Firebaseのアカウント作成とセットアップ、Zoom SDKへの登録作業等を行っていただく必要があります。また、システムインストール用PCにはマウスやキーボードは付属しませんので、別途これらもご用意ください。
導入方法については、下記のblog記事を順番にご参照ください。
- ZOOMを用いたテレイグジスタンスロボットの開発(1)
- ZOOMを用いたテレイグジスタンスロボットの開発(2)
- ZOOMを用いたテレイグジスタンスロボットの開発(3)
- ZOOMを用いたテレイグジスタンスロボットの開発 コード解説
構成図
12パンチルト装置オプション
台車ロボットの天板に搭載可能なステーと、パン・チルトそれぞれに可動軸を持つカメラ台とを追加するオプションです。
搭載したカメラのパン(左右方向への回転)、チルト(上下方向への回転)を制御可能で、深度情報が取得可能なデプスカメラと組み合わせることで、台車ロボットでの周辺情報の取得を効率よく行うことが可能です。
サンプルプログラムとして、ROSからパンチルト装置を制御するパッケージが付属します。
RealSense D435iの他、何種類かのカメラの取付に対応しています。
13リフトオプション
台車ロボットの天板に取り付けが可能な昇降機構です。単体での可搬重量は約40kg、昇降幅は50mmです。物体や棚の持ち上げのほか、持ち上げたままでの運搬や、牽引による移動などが可能です。

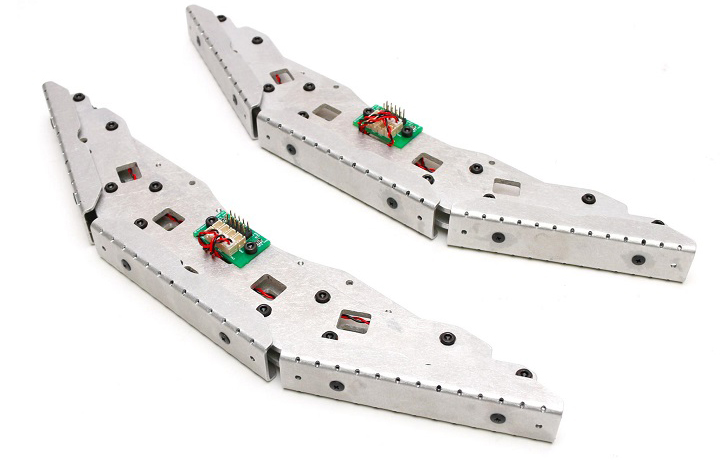
14@mobi対応ハードウェアセット
@mobi対応ハードウェアセットは、台車ロボットにおいて高度な自律走行機能を実現するソフトウェアパッケージ「@mobi(アトモビ)」に対応した、専用ハードウェアのセットです。@mobiの開発元であるパナソニックアドバンストテクノロジー株式会社と共同開発しており、手軽かつ確実に導入することが可能です。
 01-DSC04668.jpg) |
 02-DSC04681-CloseUp.jpg) |
セット内容
@mobi対応ハードウェアセットは、「メガローバーVer.3.0」または「メカナムローバーVer.3.0」の本体ご購入時の有償オプションです。@mobiを使用するために必要なハードウェアがワンパッケージになっており、別途@mobiをご購入、インストールするだけで、すぐに利用することが可能です。
- ROS PC(適合するバージョンが付属)
- 拡張機器用電源基板
- LRFオプション(適合するバージョンが付属) ※車両前方に1個搭載
- IMU
- USBハブ
- 固定板金
@mobi対応ハードウェアセットに含まれるのは@mobiの実行に必要なオプションハードウェアのみです。台車ロボット本体および、@mobiのソフトウェアは別途ご購入いただく必要があります。@mobiセットご購入時に、ソフトウェアのご購入方法についてもご案内いたします。
15有線リモコンオプション
ヴイストン株式会社製の研究開発用台車ロボットに対応した小型の有線コントローラーです。研究開発用台車ロボットの基本セットには、無線リモコンである「VS-C3」が付属しますが、電波の射出が望ましくない環境下や、より小型のコントローラーが必要な場合においては、本オプションを活用することが効果的です。なお、本オプションは、バンパーセンサーとは排他接続となります。
 |
 |
| 有線リモコンオプション | メガローバーVer.3.0への取り付け例 |
ボタン操作はカスタマイズでき、多彩な用途に対応可能
本オプションにおいては、以下に示す機能を各ボタンに割り当てています。それぞれのボタンへ割り当てる機能については、台車ロボット本体のファーウェアを変更することにより、自由にカスタマイズが可能です。用途・目的に合わせた最適化ができるため、研究開発用台車ロボットの可用性がいっそう高まります。
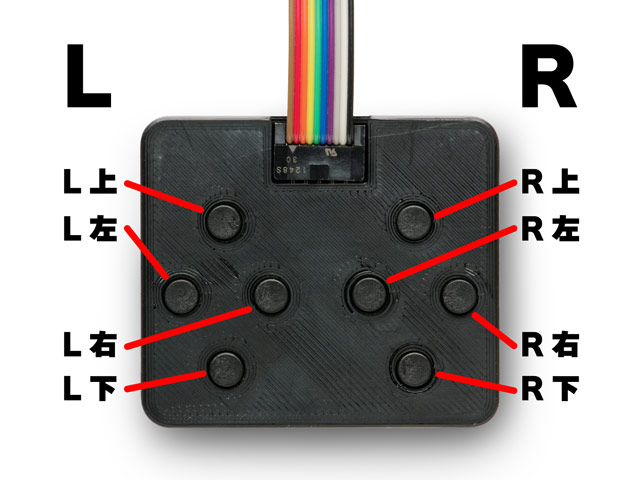
【台車ロボット用 有線リモコンオプション 初期割り当て機能】
| ボタン名称 | 機能 |
|---|---|
| L 上 | 前進 |
| L 左 | 左旋回 / 左進(全方位移動機構搭載機体の場合) |
| L 右 | 右旋回 / 右進(全方位移動機構搭載機体の場合) |
| L 下 | 後進 |
| R 上 | モーターフリー |
| R 左 | 左旋回 |
| R 右 | 右旋回 |
| R 下 | スピードアップ |
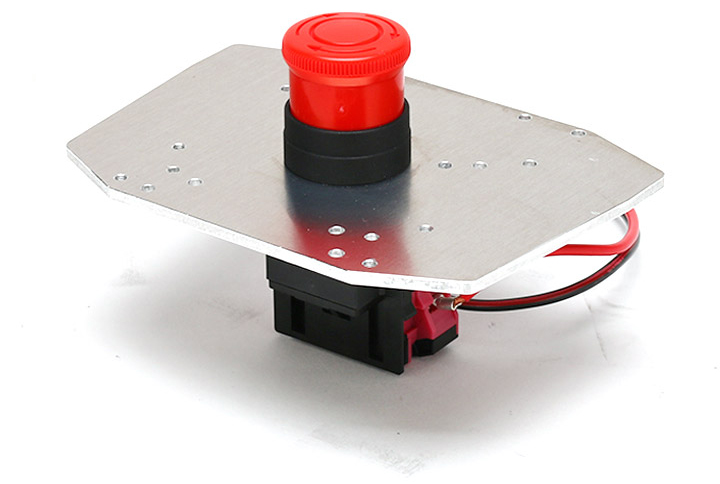
16非常停止スイッチオプション
自律動作中に予期しない動作をしたときなど、緊急に台車の電源を切りたい場合にお使いいただけます。
※一部のローバーでは標準搭載となっています。
support有償サポートのご案内
研究開発用台車ロボットについて、メールでのサポート対応ではなく、 Webミーティングでのお打ち合わせによるサポートを提供いたします。 価格は30分あたりの単価となっておりますので、1時間をご希望の場合には2口のご注文をお願いいたします。
価格:30分 1万円(税別)
【詳細・お申し込みはこちら】
Arduinoは、Arduino AGの登録商標です。
Intel、Intel Core、Intel Arcは、Intel Corporation またはその子会社の登録商標または商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。
ZoomはZoom Video Communications, Inc.のサービスであり、ZoomロゴはZoom Video Communications, Inc.の登録商標です。
BluetoothRは、Bluetooth SIG, Inc. USAの登録商標または商標です。
Raspberry PiはRaspberry Pi財団の登録商標または商標です。
GitHubは、GitHub, Inc.の登録商標です。
Nav2は、Open Navigation LLCによるオープンソースのプロジェクトです。
ROSは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
ARM、Cortexは、米国およびその他の国におけるARM Ltd.の登録商標または商標です。
HDMI、High-Definition Multimedia Interface、およびHDMIロゴは、米国およびその他の国におけるHDMI Licensing Administrator, Inc.の商標または登録商標です。
NVIDIA、NVIDIAロゴ、Jetson、NVIDIA Orin、NVIDIA JetPackは、米国または他国のNVIDIA Corporationの登録商標または商標です。
@mobiは、パナソニックアドバンストテクノロジー株式会社の登録商標です。
Wi-Fiは、Wi-Fi Allianceの登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
